车辆在路网中借助交通流模型移动。交通流模型的质量直接影响到仿真的质量。相对于速度恒定且车辆跟随过程固定的简单模型,Vissim 采用了 Wiedemann (1974) 的心理物理学感知模型 (按 Wiedemann 的交通流模型中的行驶状态)。这种模型的基本思想基于驾驶意识,也就是说高速行驶车辆的驾驶员当达到与前方行驶车辆的感知阈值时开始刹车。由于驾驶员不能非常准确的估计出前方行驶车辆的速度,那么他的车速将降低至前方行驶车辆的速度以下,当达到感知阈值后他将再次略微加速。这将导致不断地略微加速和减速。借助速度和距离状态的划分,可以考虑驾驶员的各种不同行为。
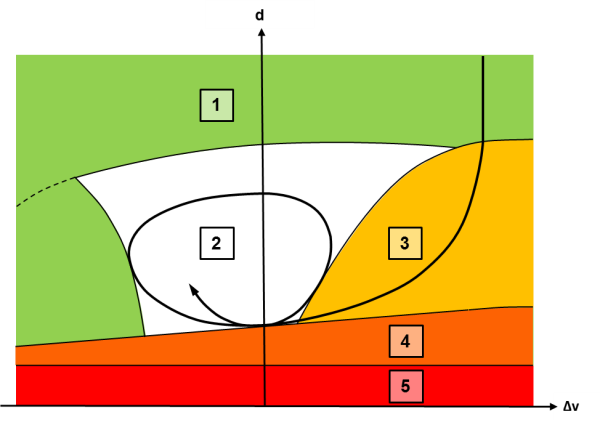
跟车模型(根据:Wiedemann 1974)
| 轴:d:间距,Δv:速度变化 | 3:接近范围 |
| 1:“自由行为”范围 | 4:制动范围 |
| 2:节点范围 | 5:碰撞范围 |
这种跟车模型依据卡尔斯鲁厄大学 (TH) 交通学院的大量测量校准(2009 年后 KIT – 卡尔斯鲁厄理工学院)。较新日期的测量保证了正确描绘当时变化的驾驶行为和车辆技术可能性。
在多车道情况下,Vissim模型中的驾驶员不仅要考虑前方行驶的车辆(默认4辆车),而且还要考虑相邻两车道的车辆。此外,在抵达停车线之前大约 100 m 信号控制机将提高驾驶员的注意力。
Vissim 中所谓的驾驶员车辆单元通过路网移动。每位驾驶员都具有行为参数,可借助这些参数为其分配指定的车辆。这样驾驶员的行为将与车辆技术可能性保持一致。描述驾驶员车辆单元的属性可以划分为下列类别:
以及: