Using conflict areas
You can use conflict areas that are displayed automatically to model conflicts between vehicles on two links or connectors via priority rules (Defining the right of way at conflict areas).
Use conflict areas instead of priority rules to model the right of way at intersections. Conflict areas are automatically displayed, are easier to edit and reflect the driving behavior better than priority rules (It is better to use conflict areas than priority rules to model driving behavior.).
You can also model conflict areas for the priority rules between vehicles and pedestrians. (Modeling conflict areas for pedestrians).
Using conflict areas to model conflict types
The following conflict types may occur on a conflict area:
- Crossing: crossing links
- Merge: Two connectors lead to the same link or a connector leads to a link with other upstream traffic.
- Branching: Two connectors come off the same link or one connector comes off a link that continues further downstream for more than 0.5 m.
By default, the attribute Conflict type determined automatically is selected for the conflict area. This allows Vissim to determine the conflict area for the conflict type (Attributes of conflict areas).
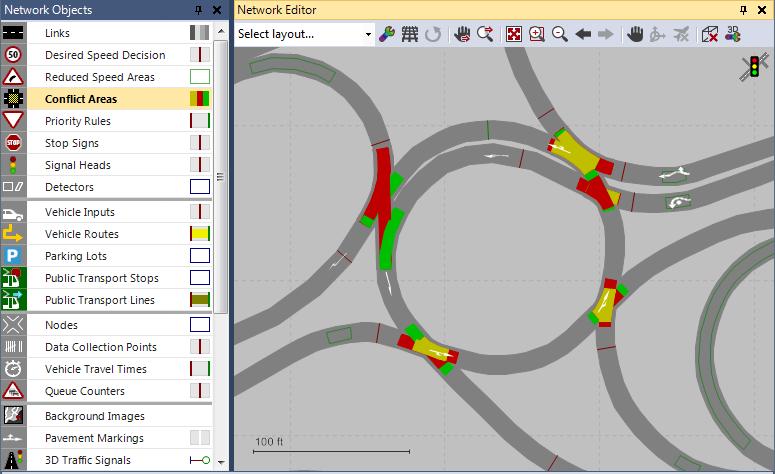
Displaying conflict areas
On the network object sidebar, click Conflict Areas to automatically show conflict areas in the network, where two links or two connectors overlap. For each conflict area, you can select the link that has the right of way. The conflict area may also remain passive and thus without any impact on the vehicles.
Conflict areas are not inserted in the following cases:
- If the height (z coordinate) of both links or both links and the connector differs more than 1.0 m in their overlapping area.
- If the overlapping is less than or equal to 0.5 m
- If at least one of the links ends less than 5 m after the start of the conflict area and no connector begins in it. This does not apply for the following links:
- Connectors
- Links which are defined as pedestrian areas (Modeling links as pedestrian areas).
- Links with input flows with vehicle compositions which contain vehicle types with the category Pedestrians (Modeling vehicle compositions)
Showing the direction, in which the conflict areas take effect
When you click a conflict area in the network editor, an arrow indicates the direction in which the conflict area takes effect. The conflict area is displayed in a lighter shade.
![]()
The letters A and B designate the routes. This enables the comparison of routes with the values in the Status column of the Conflict areas list.
It is better to use conflict areas than priority rules to model driving behavior.
Conflict areas allow you to model driving behavior better than with priority rules, as in conflict areas, drivers plan how to traverse the conflict area:
A yielding driver watches the vehicles in the main flow and then decides when to filter in. He then plans to accelerate for the next few seconds. Acceleration allows him to pass the conflict area. He thereby accounts for the traffic downstream from the conflict area. If he knows that he will have to stop or drive slowly because of other vehicles, he will account for more time to cross the conflict area or he will decide to wait for longer.
Vehicles in the major flow also react to conflict areas: If a vehicle does not manage to cross the entire conflict area because the driver has misjudged the situation, the vehicle in the major flow will brake or even stop. If a queue is forming at a signal controller downstream of the conflict area, the drivers of the vehicles in the major flow try not to stop within the conflict area in order not to block any crossing traffic. The drivers that have the right of way carry out a comparable decision-making process for crossing the conflict area as the drivers whose vehicles are yielding.
Colors indicate the status of conflict areas
The status of conflict areas is displayed in the Conflict Areas list and in the Network editor.
- Green: major flow (right of way)
- Red: minor flow (yield)
- Both red: for branching conflicts, so that vehicles can "see" each other. There is no intersection control, as vehicles simply remain in their original sequence.
- Both amber: passive conflict area without intersection control

In the Network editor:
Example: Display of the different statuses

Driving behavior at conflict areas
The driving behavior of vehicles approaching a conflict area shall produce the maximum capacity for a minor flow, without affecting vehicles of the major flow. Vehicles in the major flow might be hindered by vehicles on the merge lane, the smaller the user-defined safety distance factor is.
- A vehicle in a minor flow will calculate whether it will be able to filter into the major flow with every time step while approaching the conflict area. Thereby safety distances are taken into account (Defining the Wiedemann 74 model parameters), (Defining the Wiedemann 99 model parameters). If the driver feels there is a large enough gap in the major flow, he will simply continue to drive. If the gap is too small, the vehicle will decelerate as if it had to stop in front of the conflict area. This calculation is repeated with the next time step. So braking is either cancelled or the driver continues driving and might even accelerate, e.g. when finding a gap in the flow to enter.
- A vehicle in the major flow is careful not to collide with any vehicles in the minor flow. If it realizes that a vehicle in the minor flow will still be within the conflict area when it arrives there, it will brake in order to reach the conflict area just after the other vehicle has left it. As decelerating causes it to arrive later, it might continue its journey without any further braking in a later time step and pass right after the vehicle on the minor road.
- A vehicle in a minor flow will brake before reaching a conflict area, if there is not enough space downstream of the conflict area to leave it. This means that particularly when there are several adjacent conflict areas, drivers have to either pass all of them or none, if there is not enough space for a full vehicle length.
- With a conflict area of the conflict type Crossing, a vehicle in the major flow will try to keep the conflict area clear, if this vehicle belongs to the percentage specified in the Avoid blocking attribute (Attributes of conflict areas).
|
|
Note: Conflict areas in the conflict cases Merge and Branching are not kept free of vehicles in the major flow. To keep the major flow free of vehicles, you need to create a priority rule (Priority rule Example 2: Avoiding queues at an intersection). |

- A vehicle in the minor flow will not enter a conflict area if it has to assume that it will not be able to leave it before the next vehicle of the major flow arrives. It thereby takes the safety distance into account (Attributes of conflict areas)
- A vehicle of a minor flow that has already entered a conflict area will always try to leave it, even if this means that it has to enter another conflict area for which the Gap condition is not or no longer met.
- To avoid a collision, a vehicle may temporarily stop at an intersection within a red conflict area. If vehicle A recognizes that vehicle B is about to leave a conflict area, vehicle A can wait within another conflict area, for which it does not have the right of way, until B leaves.
- A vehicle waiting in a conflict area uses the next sufficiently large time gap to exit it. This behavior can also occur in a yielding vehicle, when it has to yield to the vehicle with the right of way. Example: A vehicle in a minor flow wants to turn into the major flow. It is waiting at an intersection in a conflict area because the vehicle in the major flow has the right of way. The vehicle in the major flow wants to turn left into the minor flow and is yielding because of oncoming traffic in the conflict area. However, if the time gap for the vehicle in the minor flow is sufficiently large, allowing it turn into the major flow in spite of the two vehicles, it leaves the conflict area and turns into the major flow. If you want a vehicle to take a min. clearance into account, define a priority rule (Modeling priority rules).
Superordinate topic:
Modeling intersection control without signal controller
Information on editing:
Defining the right of way at conflict areas
Defining right of way for conflict areas using major flow
Related topics:
