Editing the driving behavior parameter car following model
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
By default, you can edit the list (Using lists).
You can edit all driving behavior parameters for lane change, lateral behavior and following behavior in the list or in tabs with the following steps.

|
Note: In lists, you can use the |

2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Car following model tab.
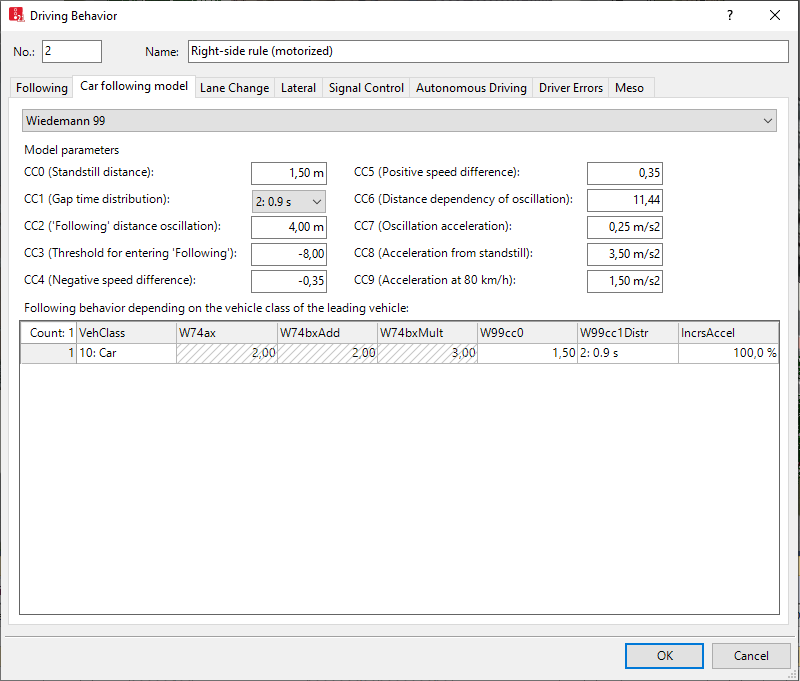
5. Enter the desired data.
| Element | Description |
|---|---|
|
List box |
Car following model for the car-following behavior. Depending on the selected car following model the Model parameters change.
|
|
Model parameters |
Displays different parameters depending on the car following model selected (Defining the Wiedemann 74 model parameters), (Defining the Wiedemann 99 model parameters). These model parameters also affect the saturation flow. |
Defining following behavior based on the vehicle class of the preceding vehicle
You can base the model parameters for the vehicle following model on Wiedemann 74 and Wiedemann 99, depending on the vehicle class of the preceding vehicle. This can be done for every vehicle class defined. The following behavior takes effect from the moment the vehicle enters the vehicle input.
1. To change the model parameters based on several vehicle classes, carry out the following steps in sequence for each desired vehicle class.
2. Right-click the section Following based on vehicle class of preceding vehicle.
3. On the shortcut menu, click Add.
A new row is inserted. The row contains the model parameters for the vehicle class with the lowest number. The latter is not displayed yet. All Wiedemann 74 and Wiedemann 99 model parameters that are relevant for the following behavior are displayed (Defining the Wiedemann 74 model parameters),(Defining the Wiedemann 99 model parameters). In the Increased acceleration column, you can define whether the vehicle falls back or accelerates when the preceding vehicle accelerates (Editing the driving behavior parameter Following behavior).
The model parameters of the vehicle following model that is not selected are marked as hatched, i.e. as not relevant.
4. Into the boxes that are not hatched, enter the desired attribute values for the following behavior of the vehicle, if they differ from the default values.
Superordinate topic:
Defining driving behavior parameter sets
Related topics:
