Editing driving behavior parameters autonomous driving
For the simulation of autonomously driving vehicles, in particular for those electronically coupled as part of a convoy (platooning), you can define attributes for driving behavior that differ from the attributes of human driving behavior.
When dealing with platoons and vehicles in platoons, Vissim accounts for specific properties and behavior (Platoon properties and properties of platooning vehicles).
|
|
Note: The simulation of platooning in Vissim is suitable for evaluating the effects of platooning as a whole on the network. However, it is not suitable for obtaining specific data on vehicles within the platoon, for example to calculate emissions of vehicles driving in the platoon. |
Examples of simulation of typical traffic situations
- Vehicles form a platoon on a lane of a defined section of a highway and continue their journey within the platoon. The platoon dissolves downstream of the link section.
- A vehicle drives up to the platoon and becomes part of it.
- The platoon's lead vehicle drives up to a vehicle and the vehicle becomes part of the platoon.
- A vehicle leaves the platoon by taking a highway exit to follow its route or path.
Using simulation results
Evaluating the simulation results of platooning can help answer the following questions, for example:
- To what extent does platooning change the standstill times on highway approaches?
- How does it impact the number of vehicles within the platoon?
- To what extent does platooning change the capacity on a link section?
|
|
Tip: You can find examples of autonomous vehicles in the directory ..\Examples Training\Autonomous Vehicles (AV). |

Example video: Platooning in your simulation
Vehicles approach preceding vehicles and form a platoon. Vissim visualizes this with the help of the graphic parameter DrawingMode > Use color scheme > Index in platoon of Vehicles In Network:
Select attributes for the driving behavior autonomous driving
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
By default, you can edit the list (Using lists).
You can edit all driving behavior parameters for lane change, lateral behavior and following behavior in the list or in tabs with the following steps.

|
Note: In lists, you can use the |

2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Autonomous Driving tab.
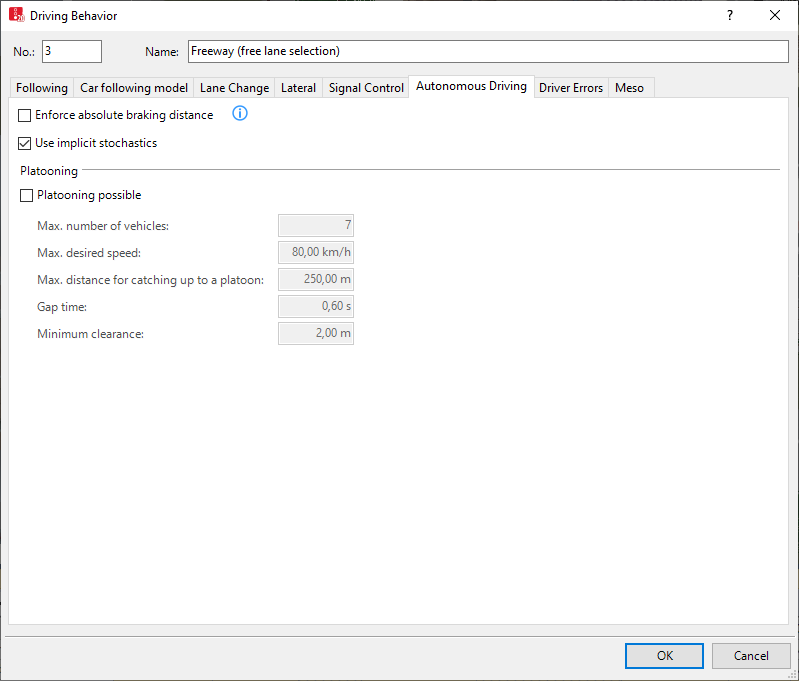
5. Enter the desired data.
| Element | Description |
|---|---|
|
Maintain absolute braking distance |
EnforcAbsBrakDist: For braking, the vehicle accounts for the distance necessary to stop without causing a collision should the vehicle in front it stop immediately without a braking distance. The absolute braking distance applies to vehicles in the following cases:
The absolute braking distance is not effective where priority rules are used. |
|
Use implicit stochastics |
UseImplicStoch:
|
|
Platooning section |
|
|
Platooning possible |
PlatoonPoss: Activates platooning, vehicles can drive within the platoon |
|
Max. number of vehicles |
Maximum number of platoon vehicles (MaxNumPlatoonVeh): Maximum number of vehicles allowed to drive in the platoon. This includes vehicles that want to leave the platoon. Default 7 |
|
Max. desired speed |
Maximum platooning desired speed (MaxPlatoonDesSpeed): Maximum speed at which all vehicles in the platoon can drive, default value 80.00 km/h. The lead vehicle and the following vehicles use the Maximum platooning desired speed, even if it differs from the desired speed. The desired speed is the default speed for each vehicle when driving outside of the platoon. In a reduced speed area, the maximum platooning desired speed is no higher than the speed of the reduced speed area. |
|
Max. distance for catching up to a platoon: |
Maximum platoon approach distance (MaxPlatoonApprDist): Maximum distance [m] to the last vehicle of a platoon up to which a vehicle tries to join the platoon. Default 250.00 m. |
|
Gap time |
Platooning - follow-up gap time (PlatoonFollowUpGapTm): Follow up gap time between a vehicle and its preceding vehicle within the platoon (Desired speed and safety distance within the platoon). Default 0.60 s |
|
Minimum clearance: |
Platooning - minimum clearance (PlatoonMinClear): Minimum clearance [m] of vehicle to preceding vehicle within the platoon (Desired speed and safety distance within the platoon). Default 2.00 m |
 If this option is selected,
If this option is selected,  If the option is deselected,
If the option is deselected, For a vehicle within the platoon, you can display its driving state, interaction state, and its position within the platoon (index in platoon) during simulation in the Vehicles in network list (Displaying vehicles in the network in a list).
