Using desired speed distributions
The distribution function of desired speeds (desired speed distribution) is a particularly important parameter, as it has an impact on link capacity and achievable travel times. If not hindered by other vehicles or network objects, e.g. signal controllers, a driver will travel at his desired speed. This applies accordingly to pedestrians.
A driver, whose desired speed is higher than his current speed, will check whether he can overtake other vehicles without endangering anyone. The more drivers' desired speed differs, the more platoons are created.
Desired speed distributions are defined independently of vehicle type or pedestrian type.
You may use desired speed distributions for vehicle compositions, pedestrian compositions, reduced speed zones, desired speed decisions, PT lines and parking lots.
Example:
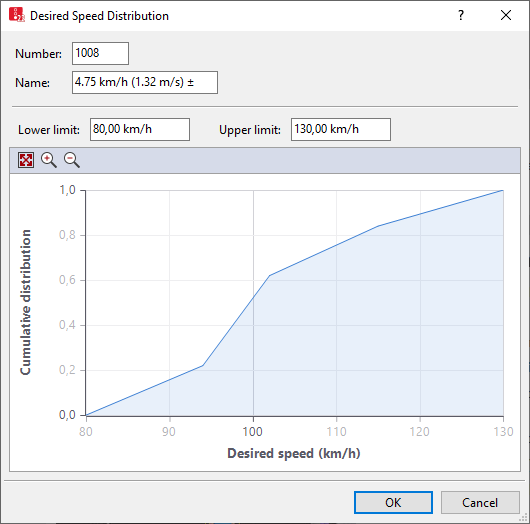
The figure shows an example in which 22 % of the vehicles drive between 80.0 and 94.50 km/h and 78% of the vehicles between 94.50 km/h and 130.00 km/h (all equally distributed across the speed range). Due to the S-shaped distribution of the three intermediate points at 94.50 km/h, approx. 104 km/h and 116 km/h, a concentration around the mean value 105 km/h is achieved.
For pedestrian simulation with Viswalk you can use desired speed distributions described in the specialized literature (Using desired speed distributions for pedestrians).
|
|
Note: Vissim provides typical default values for desired speed distributions. |

Superordinate topic:
Information on editing:
Editing the graph of a function or distribution
Deleting intermediate point of a graph
