Определить ведение к цели транспортных средств
При помощи ведения к цели можно побуждать транспортные средства искать во время поездки новые пути к стоянке назначения. Таким образом, можно отобразить принцип действия систем ведения цели.
По умолчанию транспортные средства выбирают в динамическом распределении путь к своим автостоянкам назначения в момент времени отправления от стоянки отправления. Выбор пути основан на обобщенных затратах из предыдущих итераций имитации (Процедура выбора путей с или без поиска путей). При ведении к цели выбор путей базируется на актуальной транспортной ситуации в текущей итерации. При этом используется время в пути последнего законченного интервала времени.
В то время как вы хотите разместить динамические решения маршрутов на нужной позиции в сети, транспортные средства с ведением цели после интервала ведения цели будут искать новые пути от их актуальной позиции. Необходимо ввести параметр Интерв. ведения цели. При этом ведение к цели вызывает поиск наилучшего пути для стоянки назначения.
Систему ведения к цели необходимо присвоить типам ТС (Применить типы ТС).
Ведение цели не учитывает платные маршруты. Решения платных маршрутов не влияют на ведение цели.
1. Выберите в меню Транспортное движение > Динамическое распределение > Параметры.
Откроется окно Динамическое распределение: параметры.
2. Выберите вкладку Ведение цели.
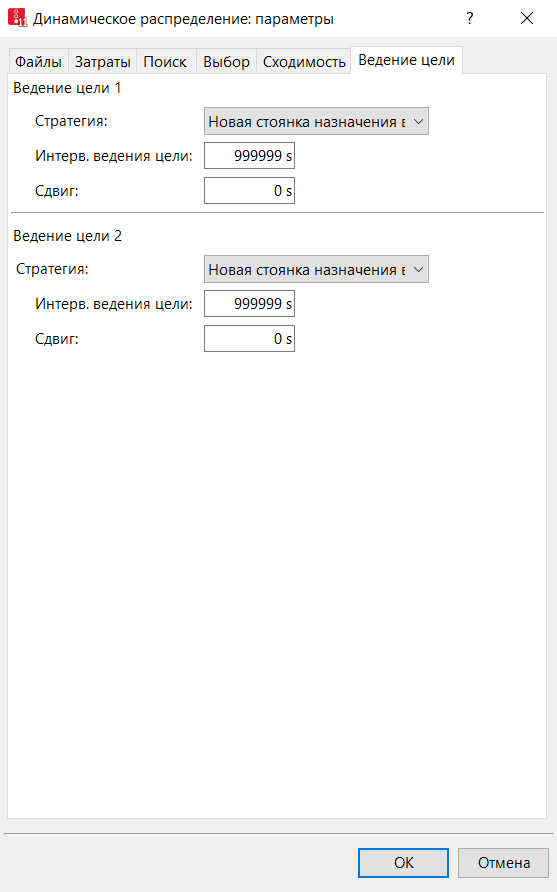
3. Выполните желаемые настройки:
| Элемент | Описание |
|---|---|
|
Ведение цели 1 Ведение цели 2 |
Можно отобразить две различные системы ведения к цели. Для каждой системы ведения к цели можно ввести стратегию, интервал ведения к цели и время сдвига. |
|
Стратегия |
Выбрать цель:
|
|
Интервал ведения цели |
Интервал времени в секундах, через который будет выполнен поиск нового пути. |
|
Время сдвига |
Период времени обработки и время действия сообщений реальных систем ведения к цели. В результате этого время в пути ведения к цели может отклоняться от времени в пути актуального интервала оценки. |
4. Подтвердите с помощью OK.