Определение параметров модели "Видеман 99"
Эта модель представляет собой несколько видоизмененную версию модели следования за впереди идущим ТС Видемана 1999 г.
Существует возможность выбрать следующие параметры:
| Параметры | Единица | Описание |
|---|---|---|
|
CC0 |
м |
Дистанция ожидания: необходимая дистанция при остановке двух транспортных средств. Без стохастического размытия. Задать поведение выше по направлению движения для статических препятствий можно с помощью атрибута Дистанция при остановке для статических препятствий (Редактировать параметр манеры езды Поведение за впереди идущим ТС). |
|
CC1 |
s |
Распределение временных промежутков: распределение времени, на основании которого рассчитывается чистый промежуток времени в секундах, который водитель намеревается выдержать дополнительно к расстоянию остановки. Необходимая дистанция безопасности для скорости v будет рассчитана следующим образом. dxsafe = CC0 + CC1 • v В случае большой транспортной загрузки это распределение оказывает существенное влияние на пропускную способность. |
|
CC2 |
м |
Колебание расстояния следования: максимальное расстояние, которое водитель допускает дополнительно к необходимой дистанции безопасности до впереди идущего транспортного средства, прежде чем осознанно приблизиться к нему. Например, на расстоянии 10 м расстояние между ними колеблется следующим образом. dxsafe и dxsafe + 10 м Значение по умолчанию 4 м вызывает стабильное поведение за впереди идущим ТС. |
|
CC3 |
s |
Порог восприятия для торможения: расстояние в секундах перед достижением максимальной дистанции безопасности (без торможения) до более медленного переднего ТС в начале процесса замедления (отрицательное число). |
|
CC4 |
м/сек |
Отрицательная разница скорости: нижний предел относительной скорости до более медленного переднего ТС во время процесса следования (отрицательное число). Более низкие абсолютные значения приводят к более тесной связи со скоростью впереди идущего ТС. |
|
CC5 |
м/сек |
Положительная разница скорости: предел относительной скорости до более быстрого переднего ТС во время процесса следования (положительное число). Рекомендованное значение: абсолютное значение CC4. Более низкие значения приводят к более тесной связи с замедлением впереди идущего ТС. |
|
CC6 |
1/(м • сек) |
Влияние расстояния на колебание: влияние расстояния на пределы относительной скорости во время процесса следования.
|
|
CC7 |
м/с2 |
Ускорение при осцилляции: колебание ускорения во время процесса следования. |
|
CC8 |
м/с2 |
Ускорение из состояния остановки: ускорение, развиваемое из состояния остановки. Ограничивается функциями нужного и максимального ускорения, назначенными для данного типа транспортного средства. |
|
CC9 |
м/с2 |
Ускорение при 80 км/ч: ускорение при 80 км/ч будет ограничено кривыми нужного ускорения и максимального ускорения, присвоенными данному типу транспортного средства. |
|
|
Примечания:
Только для ЛГКТР действует следующее: z добавляется к максимальному используемому ускорению: z = значение из интервала [0,1], нормально распределенное на 0,5 со стандартным отклонением 0,15. Ускорение транспортного средства может быть ниже его максимального ускорения, если имеет место воздействие иных факторов, например если транспортное средство приблизилось к нужной скорости или распознает движущееся с более низкой скоростью впереди идущее ТС.
|

Определение потока насыщения с помощью параметров модели Видеман 99
Потоком насыщения является количество транспортных средств, которые могут беспрепятственно проехать участок отрезка за один час. Влияние ССУ и заторов не учитывается. Поток насыщения зависит от дополнительных параметров, например, скорости, доли грузового транспорта или количества полос движения.
В модели следования за впереди идущим "Видеман 99" параметр СС1 оказывает наибольшее влияние на дистанцию безопасности и тем самым на поток насыщения. Все представленные ниже в качестве примера сценарии основаны на следующих предположениях.
- Модель следования за впереди идущим ТС "Видеман 99" с параметрами по умолчанию, исключая параметр СС1, который варьируется вдоль оси Х.
- Один шаг времени в секунду имитации.
Основными характеристиками следующих кривых являются:
|
Сценарий |
Правостороннее движение |
Полоса движения |
Скорость легк.* |
Скорость груз.* |
% груз. |
|---|---|---|---|---|---|
|
99-1 |
Нет |
2 |
80 |
не ук. |
0 % |
|
99-2 |
Нет |
2 |
80 |
85 |
15 % |
|
99-3 |
Да |
2 |
80 |
не ук. |
0 % |
|
99-4 |
Да |
2 |
80 |
85 |
15 % |
|
99-5 |
Да |
2** |
120 |
не ук. |
0 % |
|
99-6 |
Да |
2 |
120 |
85 |
15 % |
* как настройка Vissim по умолчанию
** полоса движения 2 закрыта для транспортного движения ГРУЗТР
|
|
Примечание: Кривые показывают примеры рассчитанных потоков насыщения. Для других транспортных сетей выводятся кривые с другими значениями. |
Пример: графики потока насыщения в сценариях от 99-1 до 99-6.
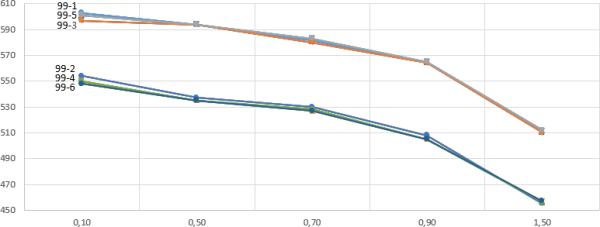
Горизонтальная Х-ось: изменение CC1: от 0,1 до 1,5.
Вертикальная Y-ось: ТС/ч/полоса движения.