Принцип действия модели следования за впереди идущим ТС
Транспортные средства перемещаются в сети с помощью модели транспортного потока. Качество модели транспортного потока оказывает существенное влияние на качество имитации. В отличие от более простых моделей, где за основу берутся постоянная скорость и детерминированный порядок следования транспортных средств, Vissim использует психофизиологическую модель восприятия Видемана (1974 г.) (Виды движения в модели транспортного потока по Видеману). Основная идея модели базируется на том, что водитель транспортного средства, движущегося с более высокой скоростью, начинает тормозить при достижении своего индивидуального порога восприятия относительно удаленности от впереди идущего ТС. Так как водитель не может точно оценить скорость впереди идущего ТС, то его скорость будет ниже скорости впереди идущего ТС, затем он снова немного ускорится после достижения другого порога восприятия. Это ведет к постоянному легкому ускорению и замедлению. Разное поведение водителей учитывается с помощью функций распределения через изменение скорости и дистанции.
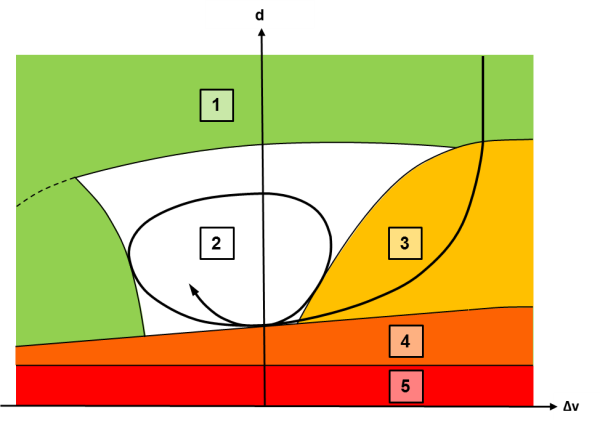
Модель следования за впереди идущим ТС (по: Видеману 1974 г.).
Легенда
| Оси: d — расстояние, Δv — изменение скорости | 3: область приближения |
| 1: область произвольного поведения | 4: область торможения |
| 2: область следования за впереди идущим ТС | 5: область столкновения |
Модель следования за впереди идущим ТС была признана эталонной после многочисленных эмпирических исследований, проведенных техническим университетом (TH) г. Карлсруэ, (с 2009 г. KIT – Karlsruher Institut fuer Technologie, Технологический институт Карлсруэ). Более актуальные измерения доказывают, что изменившаяся за последние годы манера езды и технические возможности транспортных средств корректно отображаются в данной модели.
Vissim рассчитывает ускорение транспортного средства при свободном движении и скорости ниже нужной на следующей основе.
- Если текущее расстояние соответствует нужной безопасной дистанции, транспортное средство ускоряется до скорости впереди идущего ТС. Если нужная собственная скорость ниже, транспортное средство ускоряется до нее.
- Если расстояние находится в диапазоне между 100 % и 110 % от нужной безопасной дистанции, целевая скорость интерполируется линейно.
- Если нужная безопасная дистанция больше 110 %, транспортное средство ускоряется до нужной скорости.
В случае многополосного движения водитель учитывает в модели Vissim не только впереди идущие транспортные средства (по умолчанию 4 шт.), но и транспортные средства на обеих соседних полосах. Кроме того, система ССУ привлекает повышенное внимание водителя, например за 100 м до стоп-линии.
В Vissim по сети перемещаются так называемые единицы "водитель-транспортное средство". За каждым водителем с определенными параметрами поведения числится конкретное транспортное средство. Таким образом поведение водителей соответствует техническим возможностям транспортного средства. Атрибуты, которые характеризуют единицу водитель-транспортное средство, можно подразделить на следующие категории:
- Техническая спецификация транспортного средства, например:
- Длина транспортного средства
- Максимальная скорость
- Потенциальное ускорение
а также:
- Актуальная позиция транспортного средства в сети
- Актуальная скорость и ускорение
- Поведение единицы водитель-транспортное средство, например:
- Психофизическая граница восприятия водителя, например способность оценки ситуации, чувство уверенности, готовность к риску
- Память водителя
- Ускорение в зависимости от актуальной скорости и нужной скорости водителя
- Зависимость между единицами водитель - транспортное средство, например:
- Связь с впереди идущими и последующими транспортными средствами на собственной и соседних полосах движения
- Ссылки на используемый в данный момент участок сети и следующий узел
- Ссылка на следующий дорожный знак
Вышестоящая тема: