Modeling conflict areas for pedestrians
1. Ensure that the following network objects are defined:
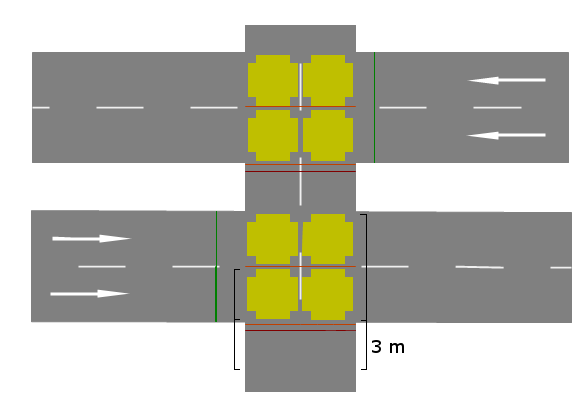
- Links for pedestrians in which the attribute Is pedestrian area is selected (Defining pedestrian links): B in the figure.
- Links for vehicles in which the attribute Is pedestrian area is deactivated (Attributes of links): A, A in the figure.
2. On the network object sidebar, click Conflict Areas.
Vissim creates passive conflict areas in the two opposite directions of pedestrian links. Passive conflict areas are marked yellow by default.
The figure shows a modeling example:

3. Repeat the following steps until the desired priority rule is shown.
4. Right-click the desired conflict area.
5. On the shortcut menu, click the desired entry:
- Set Status to 2 waits for 1:
- Set Status to 1 waits for 2:
- Set Status to Undetermined
Conflict areas on a link for pedestrians always have the same priority rule: pedestrians have the right of way or must give the right of way. Based on the current priority rule and the current speed as well as desired speed, pedestrians and vehicles decide when they can pass a conflict area.
The approaching vehicle does not perceive the pedestrian until at least 3 m before it reaches the conflict area. This distance depends on whether the pedestrian or vehicle is required to wait and on the values of the conflict area’s attributes Additional stop distance or ([Rear gap (default)] (Attributes of conflict areas):
- If the pedestrian has to wait, the following applies: 3 m + additional stop distance
- If the vehicle has to wait, the following applies: max(3m, ([Rear gap (default)] + 0.5s) * 1.5m/s)
|
|
Note: If the two links intersect at an acute angle, the distance for crossing the road is greater. This also increases the time required by pedestrians to cross the link. Since there is no geometric analysis of the relative position of the two links related by the conflict area, a pedestrian may not have yet left the lane when the next vehicle reaches the lane. |

Case 1: Pedestrians yield to vehicles
Pedestrians who want to cross the vehicle link (A1) and enter the conflict area on the left lanes of (A1) in the figure above have to consider the minimum speed that is calculated on the stop lines where the arrows end.

Minimum speeds are calculated dynamically at stop lines: pedestrians using minimum speed or a higher speed can pass the stop line, but other pedestrians have to wait before the stop line.
Pedestrians enter a conflict area with a vehicle link only if they can cross the entire link (in stages) so that they never are on a lane on which a vehicle is just passing through the conflict area. The desired speed of the pedestrian and the current speed of the vehicle are assumed here. The following are not taken into account:
- Vehicles that have not yet reached the network.
- Vehicles that are located more than 75 m times the number of lanes of the link from the conflict area. This condition can no longer be fulfilled after entering the conflict area if, for example, a vehicle accelerates or enters the network at a relatively short distance. In this case, the pedestrian waits before the first lane of the vehicle link which he probably cannot cross completely before the arrival of the vehicle.
Case 2: Vehicles have to wait
On the pedestrian link, the area 3 m upstream from the conflict area to the start of the conflict area is used as a "detector area" for the pedestrians approaching the conflict area (Modeling detectors for pedestrians). Pedestrians within the conflict area are always taken into account:
If no pedestrian is expected to enter the conflict area, the gaps between pedestrians or groups of pedestrians are transferred to the approaching vehicles. Thus they can respond accordingly.
Superordinate topic:
