Defining parking lots for dynamic assignment
You can define different parking lot types for dynamic assignment (Using parking lot types).
Conditions for placing parking lots and calculating paths
- Parking lots must always be placed on an edge between two nodes or within a node.
- Parking lots whose entire length does not lie on an edge cannot use the same edge as a start edge for departing vehicles or a destination edge for arriving vehicles.
- An edge or turn relation might run via a link with adjacent, real parking spaces on several lanes. Within a node, parking lots may be located on several turn relations. Vissim can calculate paths based on these edges.
- A route cannot lead via an edge with a parking lot that vehicles cannot drive past. This is the case in the following situations:
- if on an edge, there is a zone connector or abstract parking lot
- if on the edge, on a link with only one lane, there is a parking lot with real parking spaces
The origin parking lot and/or destination parking lie on such an edge.
- No additional parking lot may lie on an edge with a zone connector, or on an abstract parking lot, or on a parking lot with real parking spaces on a link with only one lane.
- If a parking lot is only placed on a link for destination traffic, which leads out of the network, so that from this link no other parking lot can be reached, the relative volume for this parking lot must be set to 0. Even these parking lots must be located between two nodes.
Determining the cost of an edge
The costs of an edge, on which a parking lot is located, is determined as the average of the costs of all vehicles, which drive in and out of the parking lot.
Choice of parking space when spaces are blocked
When the parking space decision is traversed and all destination parking lots only contain blocked parking spaces, the most attractive blocked parking space is chosen, if it is not occupied.
Parking lot routing decision has an effect depending on the return to the vehicle route
When a vehicle is on a route, it can only choose a parking space at a parking space routing decision that allows it to continue its route downstream of the parking space decision. Otherwise the parking route decision will be ignored. If a vehicle is not on a route, it will generally choose a parking space when one is available.
1. Define the parking lot of your choice (Defining parking lots).
The Parking Lot window opens.
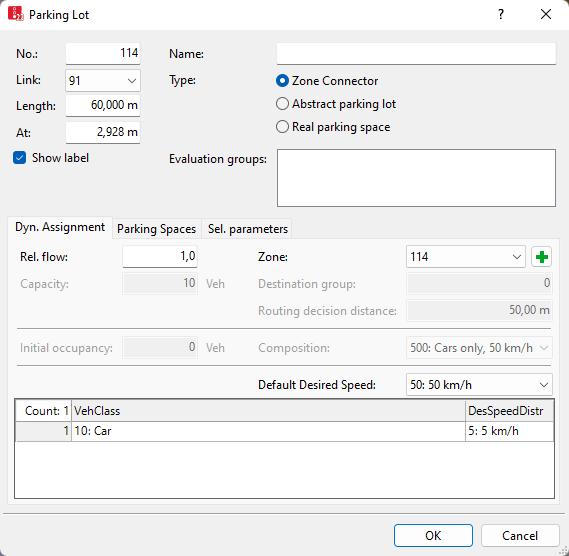
2. Select the tab Dyn. Assignment.
3. If the parking lot is meant to serve as an origin parking lot or destination parking lot with a zone connector, as Type, select Zone Connector.
4. Make the desired changes:
| Element | Description |
|---|---|
| Rel. flow |
RelFlow: only relevant in the following cases:
Example value 0 = no originating traffic for a parking lot on a link, which departs the network. For multiple parking lots, the sum of the value of a zone = 100 %. It is used to determine the percentage share per zone. You can set the relative volumes of all parking lots to the volume totals (Setting relative volumes from all parking lots on the volume totals) |
| Capacity |
Only relevant for parking lots with the Abstract parking lot attribute: Maximum number of vehicles. For Real parking spaces the value is yielded from the length of the parking lot and the length per parking space. The capacity cannot be changed. |
| Zone |
Zone number for parking lot in origin-destination matrix. Multiple parking lots can belong to a zone. The number of zones defines the dimensions of the OD matrix (Editing OD matrices for vehicular traffic in the Matrix editor).
|
| Destination group |
Only relevant for parking lots with the Real parking spaces attribute: number of the parking lot destination group that the parking lot shall be allocated to. The vehicle may choose any parking lot belonging to this destination group if one of the parking lots of this destination group is its destination. A parking lot without an allocated destination group number does not belong to any destination group. An allocated parking lot is allocated to all parking space decisions of its destination group. Thereby, the parking space decisions are not located any further from the allocated parking lot than the total of the distance to the parking space decision and the maximum distance allowed for grouping parking space decisions (by default 50 m + 50 m). For the parking lots of a destination group, the automatically generated parking space decisions are automatically combined, if they are distanced less than 50 m from each other. If the vehicle’s destination is one of the parking lots of the destination group so that it can select a parking lot of the destination group, the Criterion selected for the routing decision of the Dynamic type also applies to all parking lots of the destination group that the parking lot belongs to. For example: Parking lot full = All parking lots of the group are occupied. Parking space decisions are automatically generated at the start of the simulation (Using parking lot types). Parking space decisions cannot be displayed in lists or edited. |
| Routing decision distance | RoutDecDist: Distance of the parking space decision to the parking lot |
| Initial occupancy |
InitOccup: only relevant for Abstract parking lots and Real parking spaces. Initial occupancy in vehicles specifies which occupancy of the parking lot should be calculated at the beginning of the simulation for the destination parking lot selection. This also applies for dynamic routing decisions. The initial occupancy serves to determine the time when the capacity of the parking lot has been reached. Do not enter the number of vehicles which arrive at the parking lot and then later drive away during a simulation. These can be included in the origin-destination matrices. For Real parking spaces, enter the composition of the initial occupancy. |
| Composition |
InitOccupComp: only relevant for Real parking spaces: Choose the appropriate vehicle composition for the Initial occupancy (Modeling vehicle compositions). |
| Default Desired Speed | Desired speed distribution default (DesSpeedDistrDef): allocated desired speed distribution and desired speed per vehicle class. The default-desired speed distribution and desired speed are used for all vehicles whose type does not belong to any of the vehicle classes displayed in the list below. |
 : Open
: Open 5. Confirm with OK.
The attributes are saved in the list of Parking Lots (Attributes of parking lots).
Example for the modeling of a zone connector on the edge of a network
The figure shows a zone connector of the example file ..\dynamic assignment\Drop-Off zone.Trip Chains\Drop-Off Zone inpx:
| Toggle wireframe off | Toggle wireframe on |
|---|---|

|

|
|
|
Setting relative volumes from all parking lots on the volume totals
If you have exported a network from Visum and are using a different volume scenario with a new matrix file and a new path file, the relative volumes of the output parking lot are more suitable.
- ► Press the hotkey Ctrl+Shift+C.
The relative volumes of all of the parking lots are set to the volume totals of their paths in the current path file *.weg.
Avoiding errors when modeling parking lots
An error message such as The origin parking lot 1 is part of several different edges can mean that at least one node is missing or not positioned correctly. Thereby multiple paths can be found between both nodes between which the parking lot is located. For each of these paths, separate costs are determined. This can lead to different link costs for a link sequence (in reality, a street) and therefore cause an incorrect vehicle distribution.
In order to avoid this problem, when positioning the parking lots in the Vissim network, ensure the following:
- In the movement direction, the starting point of the path must be located before the parking lot part of the node.
- In the movement direction, the end point of the path must be located behind the parking lot part of the node.
- Both of these nodes, between which the parking lot is located, must be correctly modeled and the beginning and end points of the path must be located between two nodes.
