Editing the driving behavior parameter Following behavior
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
By default, you can edit the list (Using lists).
You can edit all driving behavior parameters for lane change, lateral behavior and following behavior in the list or in tabs with the following steps.

|
Note: In lists, you can use the |

2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Following tab.
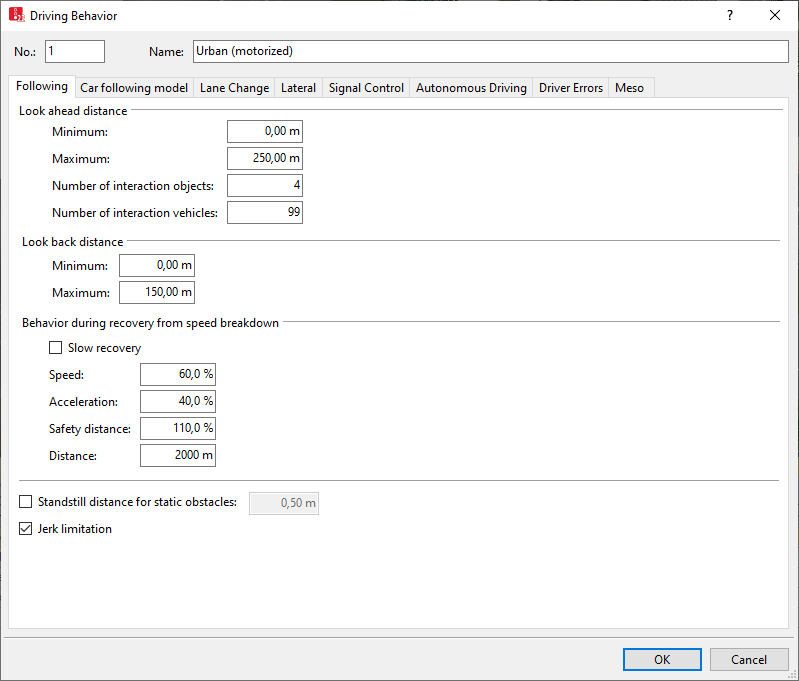
5. Enter the desired data.
| Element | Description |
|---|---|
|
Look ahead distance |
Minimum, Maximum: Minimum and maximum distance to preceding vehicles that a vehicle can see in order to react to other vehicles and interaction objects downstream along its route or path. The vehicle takes into account the look ahead distance in addition to the entered number of interaction objects. The look ahead distance has an effect on
The Minimum look-ahead distance is important when modeling the lateral behavior of vehicles.
Only the Maximum look-ahead distance needs to be extended, e.g. to model rail traffic with block signals (Modeling railroad block signals). |
|
Number of interaction objects |
Number of preceding vehicles and/or number of network objects listed below which the vehicle perceives along its route or path in order to react to them. In addition to the number of observed vehicles entered, vehicles take the minimum and maximum Look ahead distance into account. In Vissim, the following network objects are modeled as vehicles. Vehicles treat these network objects as a preceding vehicle. These network objects act like a red signal head. If there are several of these network objects within a very short distance, enter a larger number for the Number of interaction objects. However, this can lead to slightly longer simulation computation times.
Vehicles also treat the following network objects as a preceding vehicle, when they have to stop there:
Behavior in conflict areas: A vehicle takes into consideration all downstream conflict areas, up to the furthest interaction object specified under the number of interaction objects. To include conflict areas in the Number of interaction objects, for the applicable driving behavior, select the attribute option Conflict areas count as interaction objects (Editing the driving behavior parameter driver error). Default values of Number of interaction objects for predefined driving behavior:
In the Number of interaction vehicles attribute, you can limit the number of vehicles considered independently of other network objects. The vehicle is maximally aware of the Number of interaction objects. |
|
Number of interaction vehicles |
Number of preceding vehicles that the vehicle perceives along its route or path in order to react to them. The vehicle looks at the maximum number of interaction objects (vehicles and network objects) along its route or path, if the minimum look ahead distance does not force it to look further. The vehicle only considers the maximum number of vehicles specified in the Number of interaction vehicles, it still considers other network objects. Thus, a number of interaction vehicles >= number of interaction vehicles has no effect. Example: Set the value Number of interaction vehicles =1 to model an autonomous vehicle whose sensors should not be able to detect other vehicles through a vehicle in front, but should be able to detect all traffic signs with the help of Car2X communication. |
|
Look back distance |
Minimum, Maximum: The look back distance defines the minimum and maximum distance to vehicles that a vehicle can see behind it in order to react to other upstream vehicles. The look back distance only affects the vehicle’s perception of other vehicles, it does not perceive other interaction objects. The number of interaction objects within the Look back distance is only taken into account when calculating the vehicle’s lateral behavior. In all other cases, the vehicle perceives a maximum of one other vehicle when looking back. Lateral behavior: Effect of the minimum look back distance: If several vehicles can overtake within a lane, this value needs to be greater than 0.00, e.g. in urban areas it could be 20-30m, with correspondingly larger values in other places. This way you make sure the cars drive in an orderly fashion, when on the same route two or more vehicles than specified in the attribute Number of interaction objects want to position themselves at a stop line. This applies in particular to bicycles. You can reduce the maximum look-back distance in close-meshed networks, e.g. with many connectors over a short distance. This may positively affect the simulation speed. |
|
Standstill distance for static obstacles |
Standstill distance (ax) for vehicles upstream of static obstacles. These are, for example, signal heads, stop signs, bus stops, priority rules, conflict areas. Not valid for stop signs in parking lots. Minimum value: 0.01 m, maximum value: 10 m, default value: 0.5 m. If you open an *.inpx file where the attribute value is 0, the value is changed to 0.01 m. You can also use this standstill distance to define the stopping position of public transport vehicles at stops with platform screen doors and queues at fixed positions on the platform. The public transport vehicle stops at the stop with its front edge at the standstill distance (ax)+ 1 m position. The one meter ensures that the public transport vehicle can exit from the stop. To allow boarding and alighting, the length of the stop must be at least equal to the length of the public transport vehicle + standstill distance (ax)+ 1 m. Vehicles stop in front of signal heads at standstill distance (ax)+ 0.5 m. |
|
Jerk limitation |
JerkLimit:
In the following situations, no jerk limitation occurs, even if the Jerk limitation option is selected:
|
 If the option is selected, the acceleration of the vehicle is limited between two time steps.
If the option is selected, the acceleration of the vehicle is limited between two time steps. If the option is not selected, the acceleration of the vehicle can change arbitrarily between two time steps. For example, a vehicle accelerating from a standstill can achieve its desired acceleration.
If the option is not selected, the acceleration of the vehicle can change arbitrarily between two time steps. For example, a vehicle accelerating from a standstill can achieve its desired acceleration.In the Driving behavior list, you can select additional attributes. Among them are the following for example:
| Element | Description |
|---|---|
|
Increased Acceleration |
IncrsAccel: Allows you to increase the acceleration with which the vehicle follows a preceding vehicle that accelerates. Default value 100 %, value range 100 % to 999 %. With the default value 100%, the vehicle falls back in distance from the preceding vehicle when the latter accelerates. Only when the preceding vehicle stops accelerating does the following vehicle approach it. If the value > 100 %, the vehicle accelerates when the preceding vehicle accelerates and unimpeded acceleration is possible. Increased Acceleration affects the car following models Wiedemann 74 and Wiedemann 99. Increased Acceleration has an impact on the following types of acceleration:
Jerk limitation in the Wiedemann 99 car following model: If the vehicle is in the interaction state Free, acceleration is limited in the first time step of the vehicle via the model parameter CC7 Oscillation acceleration. Jerk limitation is not performed if a value > 100 % is selected for Increased Acceleration, the distance dx > safety distance dsx and the preceding vehicle is accelerating. |
