Editing the driving behavior parameter Lane change behavior
1. On the Base Data menu, click > Driving Behaviors.
The Driving Behaviors list opens. Some driving behavior parameter sets can be predefined.
By default, you can edit the list (Using lists).
You can edit all driving behavior parameters for lane change, lateral behavior and following behavior in the list or in tabs with the following steps.

|
Note: In lists, you can use the |

2. Right-click the entry of your choice.
3. On the shortcut menu, click Edit.
The Driving Behavior window opens.
4. Select the Lane Change tab.
You can edit the already defined network objects in the Driving Behaviors list or via the menu Base Data > Driving Behaviors.
5. Make the desired changes:
| Element | Description | ||
|---|---|---|---|
|
General behavior |
Lane change rule (LnChgRule):
Regardless of the option selected, you can model the general behavior more realistically using the settings under Cooperative lane change. |
||
|
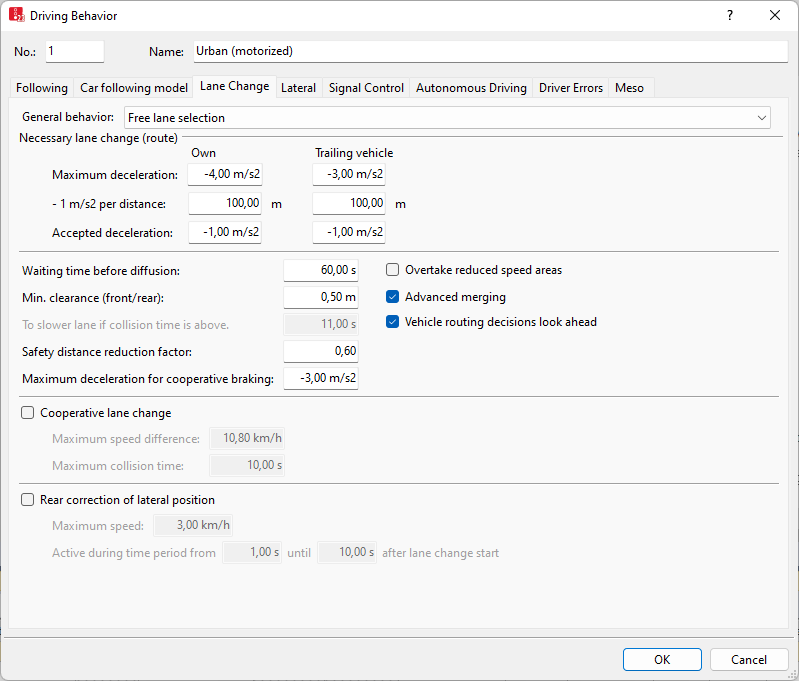
Necessary lane change (route) |
|
||
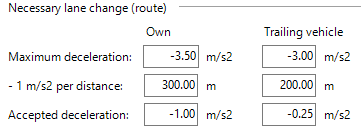
For example, the following parameters yield the course of the curve shown below:
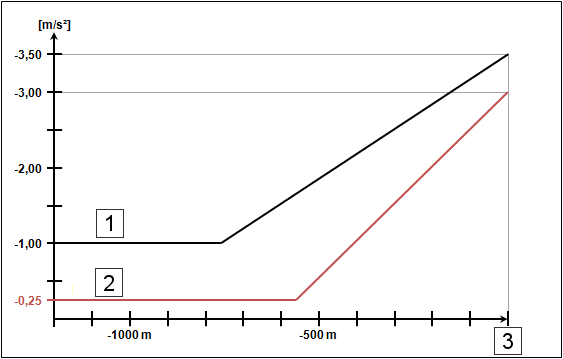
Legend:
1 black line: lane changer (own)
2 red line: trailing vehicle
3: emergency stop distance
| Element | Description | |
|---|---|---|
|
Diffusion time |
DiffusTm: The maximum amount of time a vehicle can wait at the emergency stop distance for a necessary change of lanes. When this time is reached the vehicle is removed the network, at the same time a warning is written to the *.err file and displayed in the Messages window. |
|
|
Minimum clearance (front/rear) |
( MinClear): The minimum distance between two vehicles that must be available after a lane change, so that the change can take place (default value 0.5 m). A lane change during normal traffic flow might require a greater minimum distance between vehicles in order to maintain the speed-dependent safety distance. |
|
|
To slower lane if collision time is above |
Free driving time (FreeDrivTm): only for Slow lane rule or Fast lane rule: defines the minimum distance to a vehicle in front, in seconds, which must be present on the slower lane, so that an overtaking vehicle switches to the slower lane. |
|
|
Safety distance reduction factor: |
The Safety distance reduction factor (lane change) (SafeDistRedFact) is taken into account for each lane change. It concerns the following parameters:
During the lane change Vissim reduces the safety distance to the value that results from the following multiplication: Original safety distance • safety distance reduction factor The default value of 0.6 reduces the safety distance by 40%. Once a lane change is completed, the original safety distance is taken into account again. |
|
|
Maximum deceleration for cooperative braking |
Maximum cooperative deceleration (CoopDecel): Specifies to what extent the trailing vehicle A is braking cooperatively, so as to allow a preceding vehicle B to change lanes into its own lane, default value -3 m/s2. Thereby the following applies:
During cooperative braking, a vehicle decelerates with the following values:
|
|
|
Overtake reduced speed areas |
OvtRedSpeedAreas: This option is not selected by default.
|
|
|
Advanced merging |
AdvMerg: This option is selected by default in the driving behavior parameter sets in newly created networks. The option is considered for any necessary lane change towards the next connector along the route.
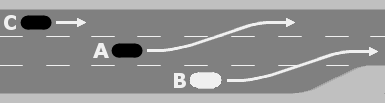
If vehicle A has to change lanes and recognizes that the neighboring vehicle in front B on the target lane has approximately the same speed or is only slightly faster (-1.0 m/s < dv < 0.1 m/s), A slows down slightly (by 0.5 m/s²) to move into the gap behind B, if the option is selected.
If the vehicle A with vehicle in front C detects that a neighboring vehicle in front B wants to change to the lane of A, this option can be used so that cooperative braking of A also take place when B is downstream from C.
Let us assume vehicle B is a neighboring vehicle in front of vehicle A. A plans to let B merge, who is meanwhile driving downstream of C (in front of vehicle A), on its own lane. In this case, vehicle A forgets that B should have been permitted to merge. Thus, vehicle A can immediately permit other vehicles to change into its lane.
If vehicle A wanted to allow the vehicle ahead of it on the other lane, B, to merge, but B did not change lanes and A, in the meantime, has overtaken B, this option allows vehicle A to forget that it should have let B merge. Thus, vehicle A can immediately permit other vehicles to change into his lane.
|
|
|
Vehicle routing decisions look ahead |
VehRoutDecLookAhead: |
|
|
Cooperative lane change |
CoopLnChg: If vehicle A observes that a leading vehicle B on the adjacent lane wants to change to his lane A, then vehicle A will try to change lanes itself to the next lane in order to facilitate lane changing for vehicle B. For example, vehicle A would switch from the right to the left lane when vehicle B would like to switch to the left from a merging lane to the right lane.
Vehicle A behaves during this lane change as if it would have to change lanes due to a connector at a long distance. It accepts its own Maximum deceleration and the deceleration of the trailing vehicle C on the new lane, in accordance with the parameters for the necessary lane change. Vehicle A does not make a cooperative lane change, when the following conditions are true:
|
|
|
Rear correction of lateral position |
RearCorr: If a lane change takes place at a lower speed than specified in the Maximum speed box, the vehicle's rear end moves laterally. The rear correction compensates for this movement. This causes the vehicle to be aligned to the middle of the lane at the end of the lane change, instead of at angle in the original lane. The rear correction is performed completely, even when the vehicle comes to a standstill. A rear correction affects the capacity. Rear correction is only performed if for the driving behavior parameter Lateral behavior the option Observe adjacent lane(s) is selected (Editing the driving behavior parameter Lateral behavior).
The attributes Active during time period from and to also determine the speed at which a rear correction is performed. |
|

 If this option is selected, vehicles immediately upstream of a reduced speed area may perform a free lane change
If this option is selected, vehicles immediately upstream of a reduced speed area may perform a free lane change  If the option is not selected, vehicles never start a free lane change directly upstream of a reduced speed area. They also completely ignore the reduced speed areas on the new lane.
If the option is not selected, vehicles never start a free lane change directly upstream of a reduced speed area. They also completely ignore the reduced speed areas on the new lane.