Les temps de déplacement pour le trafic individuel motorisé sont déterminés au moyen de l’occupation des tronçons et des mouvements au nœud, qui résulte de la charge de trafic et de la capacité de ces éléments de réseau. Pour cette raison, contrairement aux temps de déplacement TC, les temps de déplacement TI varient et peuvent seulement être prévus avec une certaine probabilité avant le début du déplacement. Le temps de déplacement TI sur un itinéraire entre deux zones se compose des éléments suivants :
- Temps de rabattement et d’accès à destination
- Temps de parcours sur les tronçons
- Suppléments de temps pour les mouvements tournants aux nœuds
Dans le réseau à vide, le temps de parcours t0 sur un tronçon résulte de la longueur du tronçon et de la vitesse autorisée sur ce tronçon v0. Pour les mouvements tournants à une intersection, le supplément de temps t0 est affiché directement. Dans le réseau chargé, le temps de parcours sur le tronçon et le supplément de temps de mouvement tournant sont calculés au moyen d’une fonction dite de débit-vitesse (fonction D-V). Cette fonction de restriction de capacité décrit la corrélation entre la charge de trafic actuelle q et la capacité qMax. Elle permet de calculer le temps de parcours actuel dans le réseau chargé tChg. Visum propose plusieurs types de fonctions pour les fonctions débit vitesse :
1. La fonction BPR du Traffic Assignment Manual de l’organisme américain Bureau of Public Roads (Illustration 66)
2. Une fonction BPR modifiée avec un paramètre b différent pour l’état de réseau occupé et non occupé (Table 79)
3. Une fonction BPR modifiée pour laquelle vous pouvez spécifier un supplément de temps d additionnel pour chaque véhicule dans le réseau occupé (Table 80)
4. La fonction INRETS élaborée par l’Institut National de Recherche sur les Transports et leur Sécurité (Illustration 67)
5. Une fonction constante pour laquelle la capacité n’influe pas sur le temps de parcours (tChg = t0)
6. Diverses fonctions pour les mouvements tournants (c.-à-d. que t0 est ajouté et non multiplié) ainsi que le type de fonction goulot d’étranglement linéaire, qui sont utilisés en fonction du type de mouvement au nœud
7. Une fonction BPR modifiée supplémentaire (LOHSE) avec une pente linéaire dans le secteur de surcharge conformément aux théories des files d’attente pour obtenir des temps plus réalistes dans le secteur de surcharge et un meilleur comportement dans les affectations, car des modifications moindres des charges n’entraînent pas de modifications disproportionnées du temps de parcours. La fonction est monotone, continue et différentiable, également au point de jonction sat = satcrit.
|
Nota : Outre les fonctions D-V disponibles dans Visum, vous pouvez aussi configurer des fonctions D-V définies par l’utilisateur (Fonctions débit-vitesse définies par l’utilisateur). |
La Table 77 montre les variables utilisées dans les descriptions des fonctions D-V.
|
sat |
Occupation |
|
satcrit |
Degré de saturation où commence la section linéaire de la fonction D-V |
|
tcur |
Temps de parcours actuel dans le réseau chargé [s] (tChg) |
|
t0 |
Temps de parcours à vide [s] |
|
q |
Charge actuelle = somme des charges de tous les systèmes de transport TI [UVP/unité de temps], y compris la charge initiale
|
|
qmax |
Capacité [UVP/unité de temps] |


Les paramètres contenus dans la Table 78 sont valables pour toutes les fonctions D-V. Les paramètres spécifiques aux fonctions sont décrits avec la fonction D-V respective.
|
|
|
|
a, b, c |
Paramètres définis par l’utilisateur a∈ [0.00;∞), b∈ {0.00...10.00}, c∈ [0.00;∞) |
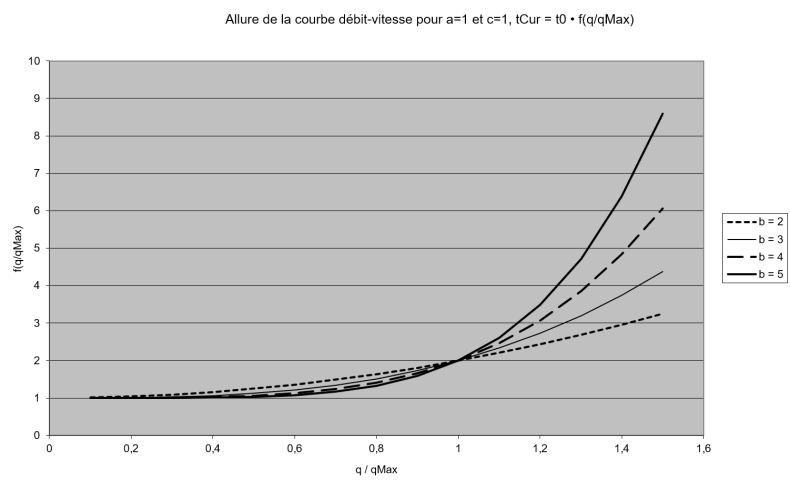
Illustration 66 : Type de fonction D-V BPR d’après le Traffic Assignment Manual
|
|
|
|
satcrit |
satcrit = 1 |
|
a, b, b’, c |
Paramètres a∈ [0.00;∞), b, b’∈ {0.00...10.00}, c∈ [0.00;∞) |
|
|
|
|
satcrit |
satcrit = 1 |
|
a, b, c, d |
a∈ [0.00;∞), b∈ {0.00 ...10.00}, c∈ [0.00;∞), d∈ {0.00...100.00} |
 , où
, où 
|
|
avec |
|
|
a, c |
a∈ [1.1;100), c∈ [0.00;100) |
|


|
|
avec |
|
|
a, c |
a∈ [1.1;100), c∈ [0.00;100) |
|

 , où
, où 
Variante de coût marginal de la fonction CONIQUE élaborée par Spiess pour calculer un optimum système au lieu d’un optimum usager dans l’affectation à l’équilibre.
|
|
|
|
satcrit |
satcrit∈ [0.00;10] |
|
a, b, c, d |
a∈ [0.0001;100], b∈ [0.0001;10000], c∈ [0.00;100], d∈ [0.0001;10000] |
 , où
, où 
La fonction modélise les files d’attentes sur les voies d’accès dont l’afflux est régulé par des installations de signalisation lumineuse (Ramp Metering).
|
|
|
|
satcrit |
satcrit = 1 |
|
q |
Charge actuelle = somme des charges de tous les systèmes de transport TI [UVP/unité de temps], y compris la charge initiale
|
|
a |
Paramètre défini par l’utilisateur a∈ {0.00..1.10} |
|
c |
Paramètre de capacité défini par l’utilisateur c∈ [0;∞) |
 , où
, où 

Table 84 : Type de fonction D-V INRETS
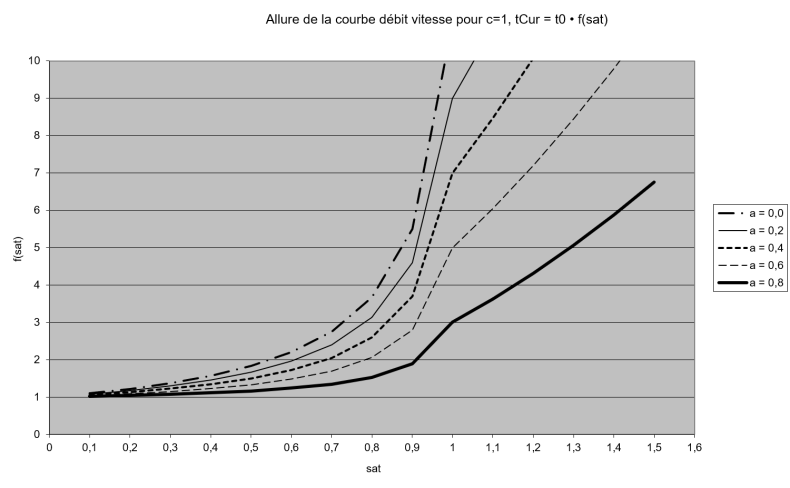
Illustration 67 : Type de fonction D-V INRETS
Les fonctions temps généralisés figurant dans la Table 85 sont particulièrement adaptées pour la modélisation de temps généralisés de mouvements tournants. Dans chaque cas, un temps d’attente dépendant de l’occupation est ajouté au temps d’attente de base t0.
|
|
LOGISTIQUE |
|
|
|
CARREE |
|
|
|
SIGMOIDE_MMF_NODES (anciennement SIGMOIDE_MMF) |
|
|
|
SIGMOIDE_MMF_LINKS (anciennement SIGMOIDE_MMF2) Contrairement à la fonction SIGMOIDE_MMF_NODES, le terme de temps d’attente n’est pas ajouté à t0 mais multiplié. |
|
|
a, b, c, d |
a, b, c, d∈ [0.00…100.00}, f∈ {0.00...10.00}. La plage des valeurs pour le paramètre f des fonctions D-V SIGMOIDAL_MMF_NODES et SIGMOIDAL_MMF_LINKS est de 0 … 100. |
|

Table 85 : Types de fonctions D-V LOGISTIQUE, CARREE, SIGMOIDE_MMF_NODES, SIGMOIDE_MMF_LINKS
|
|
AKCELIK |
|
La fonction décrit des temps d’attente au nœud avec a = durée en heures b = paramètre de familles d = capacité d’une voie par heure |
|

|
|
AKCELIK2 |
|
a = durée en heures b = paramètre de familles d = 1 / nombre de voies (du tronçon) qmax = capacité de l’élément de réseau (du tronçon) Contrairement à la fonction AKCELIK, cette fonction se rapporte directement à la capacité de l’élément de réseau dans le dénominateur. De plus, AKCELIK2 ne décrit pas les temps d’attente au nœud mais la diminution de la vitesse sur un tronçon. La valeur d est intentionnellement un paramètre libre, bien qu’on puisse aussi utiliser directement l’attribut de tronçon Nombre voies. En se détachant de cet attribut qui doit toujours contenir le nombre de voies disponibles physiquement (par exemple pour l’exportation vers Vissim), vous pouvez modéliser les déperditions de capacité liées aux manœuvres de stationnement à l’aide d’une valeur appropriée de d. d= 0.6 correspondrait ainsi à une capacité un peu inférieure à celle de deux voies. |
|

|
|
|
|
satcrit |
satcrit∈ [0.00;10] |
|
a |
[(a + 1) • t0] donne tcur lorsque sat = 1 a∈ [0.00;1000] |
|
b |
Détermine le coefficient de l’accroissement jusqu’au point sat = satcrit b∈ [0.00;10] |
|
c |
Paramètre de multiplication pour déterminer les dimensions de q et qmax c∈ [0.00;100] |

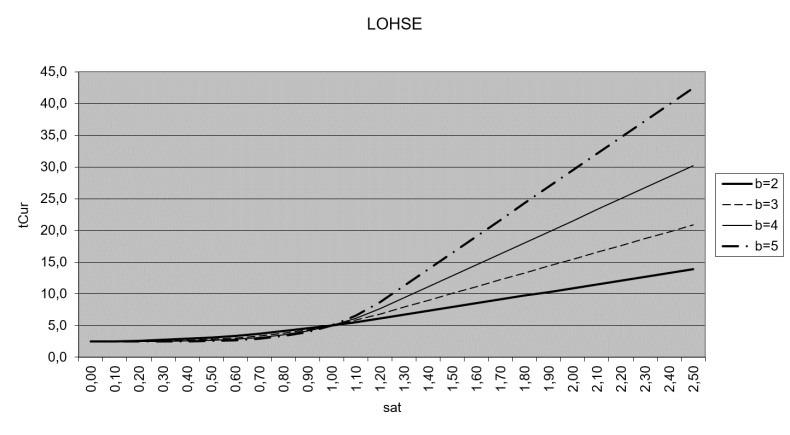
Illustration 68 : Type de fonction D-V LOHSE
Certains projets requièrent toutefois des fonctions D-V non standardisées parce qu’ils contiennent par exemple d’autres attributs de tronçons ou parce que la conversion de charges en unités de véhicules particuliers (UVP) est spécifique au projet. Dans ce cas, vous pouvez personnaliser les fonctions D-V prédéfinies avec vos propres formules (Fonctions débit-vitesse définies par l’utilisateur).