Pour modéliser le phénomène d’encombrement, on admet que chaque arc est caractérisé par deux goulots d’étranglement variables dans le temps, la capacité d’afflux au début et la capacité d’écoulement à la fin.
La capacité d’afflux, limitée par la capacité d’entrée, est censée reproduire l’effet des congestions se propageant en amont sur l’arc qui peuvent atteindre la section initiale et provoquer des conditions d’encombrement sur les arcs en amont. Dans ce cas, la capacité d’afflux est configurée pendant l’affectation de manière à limiter l’afflux actuel à la valeur pour laquelle le nombre de véhicules sur le tronçon correspond à la capacité de file d’attente actuellement disponible. Celle-ci est une fonction de la distribution temporelle de la charge d’écoulement, car la densité de congestion maximale varie de manière dynamique du point de vue temporel et spatial le long de l’arc conformément à la théorie simplifiée des ondes cinématiques (STKW). L’espace libéré par les véhicules quittant l’arc au NoeudDest de la file d’attente n’est à vrai dire réellement disponible au NoeudOrig de la file d’attente qu’après un moment. La densité de congestion maximale multipliée par la longueur n’est alors que la limite supérieure de la capacité de file d’attente pouvant uniquement être atteinte en cas de file immobile.
La capacité d’écoulement, limitée par la capacité de sortie, est censée reproduire l’effet des congestions se propageant en amont depuis les arcs situés en aval, qui peuvent provoquer des états de charge surcritiques sur l’arc lui-même. Pour des afflux et des écoulements d’arcs donnés, les capacités d’écoulement sont obtenues en tant que fonction des capacités d’afflux des arcs situés en aval et de la conservation de flux au nœud.
Le modèle de temps généralisé du réseau se compose de trois sous-modèles interdépendants, le « modèle de temps d’écoulement et de temps de déplacement pour les capacités variables dans le temps », le « modèle de capacités d’afflux » et le « modèle de capacités d’écoulement », calculé de manière itérative. L’Illustration 129 montre les trois modèles dans le contexte. Les temps de déplacement découlant des trois composantes du modèle avec retour d’informations en tant que solution sont regroupés avec le coût monétaire dans un coût généralisé au moyen d’un modèle de coût d’arcs.
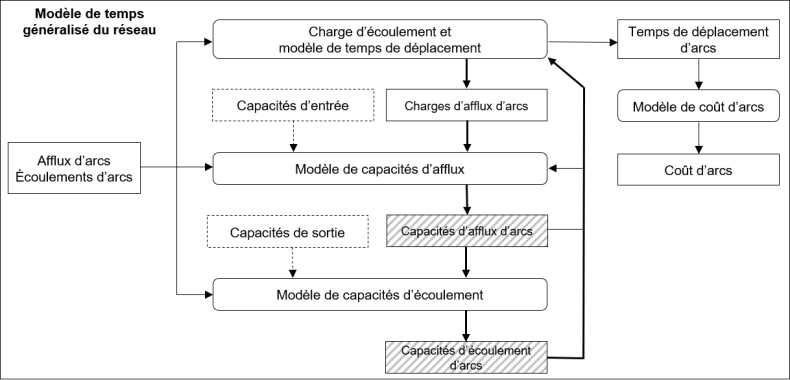
Illustration 129 : Aperçu de l’approche de point fixe pour le modèle de temps généralisé du réseau
Modèles de temps d’écoulement et de temps de déplacement pour des capacités d’écoulement variables dans le temps
En admettant que la règle FIFO est appliquée et qu’aucun véhicule ne peut donc en dépasser un autre, un modèle de temps généralisé d’arc avec une capacité d’écoulement variable dans le temps est présenté. On obtient la distribution temporelle d’écoulement en propageant la distribution temporelle d’afflux le long du tronçon et en calculant la distribution temporelle du temps de déplacement correspondante à partir de cette dernière.
En admettant que la capacité n’est pas réduite à la fin d’un arc donné a∈A en raison d’un encombrement, le temps de sortie sous-critique ra(τ) peut être exprimé en fonction de la portion précédente de la distribution temporelle d’écoulement pour un véhicule s’engageant sur l’arc à l’instant τ, ce qui correspond à l’afflux fa(σ) à chaque instant σ ≤ τ.

L’équation [32] est décrite plus loin.
- Pour le diagramme fondamental trapézoïdal (Modèle de temps d’écoulement pour un diagramme fondamental trapézoïdal) (Illustration 128)
- Pour le diagramme fondamental parabolique (Modèle de temps d’écoulement pour un diagramme fondamental parabolique) (Illustration 127)
Si toutefois il existe un goulot d’étranglement à la fin de l’arc avec une capacité variable dans le temps Ψa(τ) ≤ Sa pour chaque instant σ, on détermine dans un premier temps la distribution temporelle de l’écoulement cumulé, dont la valeur Ea(τ) à l’instant t est définie de la manière suivante.

Ψa(τ) exprime la capacité d’écoulement cumulée à l’instant t.

Cela signifie qu’entre les instants σ et τ, Ψa(τ) - Ψa(σ) véhicules peuvent quitter le tronçon.
L’équation [33] ci-dessus repose sur la définition suivante de la règle FIFO : le temps d’écoulement cumulé à l’instant d’écoulement ta(τ) d’un véhicule s’engageant sur l’arc à l’instant t correspond à l’afflux cumulé à l’instant t. On a :

L’équation [33] peut alors être expliquée comme suit. S’il n’existe aucune congestion à un instant t donné, le temps de déplacement est identique au temps de déplacement sous-critique, de sorte que l’écoulement cumulé est égal à l’afflux cumulé à l’instant ra-1(τ), en s’appuyant sur la règle FIFO [35] (un véhicule qui s’engage sur l’arc à l’instant ra-1(τ) le quitte à l’instant t). Si une congestion se forme à l’instant s < t, l’écoulement correspond en revanche à la capacité d’écoulement de cet instant jusqu’à l’instant de résorption de la congestion. En s’appuyant sur la règle FIFO, l’écoulement cumulé Ea(τ) découle alors de l’afflux cumulé à l’instant ra-1(σ) en additionnant l’intégrale de la capacité d’écoulement entre σ et t, c.-à-d. Ψa(τ) - Ψa(σ).
Par définition, l’écoulement ea(τ) de l’arc a à l’instant t est le suivant :
Par définition, ea(τ) ≤ Ψa(τ) à chaque instant τ et des écoulements surcritiques surviennent lorsque ea(τ) = Ψa(τ).
Si les distributions temporelles des afflux et écoulement cumulés sont connues, une équation implicite résulte de la règle FIFO [35] pour la distribution temporelle du temps d’écoulement de l’arc.

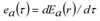
L’Illustration 130 présente une interprétation graphique de l’équation [37], la distribution temporelle de l’écoulement cumulé Ea(τ) correspondant aux enveloppes inférieures des courbes suivantes :
a) l’afflux cumulé Fa(τ), décalé vers la droite du temps de déplacement sous-critique ra(τ) - τ et résultant en une distribution temporelle Fa[ra-1(τ)]. Ceci représente la proportion de véhicules engagés sur l’arc qui arrivent à la fin de l’arc.
b) pour chaque instant s, la distribution temporelle cumulée de la capacité d’écoulement est décalée verticalement, de sorte que la courbe passe par le point (σ,Fa[ra-1(σ)]). Ceci représente la proportion de véhicules pouvant quitter l’arc après l’instant s. Il n’y pas de congestion lorsque la courbe a) est située en dessous des courbes d’écoulement. Une congestion se forme dès que la courbe d’écoulement cumulé passe sous la courbe d’afflux cumulé décalée dans le temps, c.-à-d. lorsque le nombre de véhicules atteignant la section finale de l’arc est supérieur au nombre de véhicules quittant l’arc. Dans le diagramme, la congestion se forme à l’instant s’’. Dans l’Illustration 130, le calcul du temps d’écoulement sur la base des distributions temporelles d’afflux et d’écoulement cumulées est visualisé à l’aide des flèches épaisses.
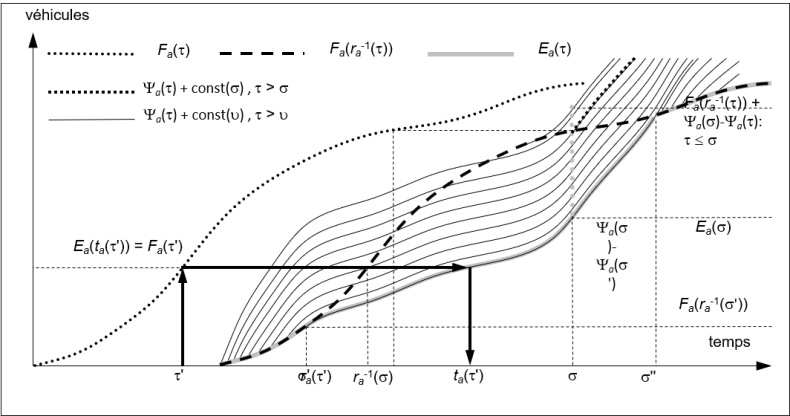
Illustration 130 : Arc avec une capacité variable dans le temps
Modèle de temps d’écoulement pour un diagramme fondamental trapézoïdal
Lorsqu’on utilise le diagramme fondamental trapézoïdal pour représenter les états de charge sur l’arc, la vitesse sous-critique sur le tronçon est constante et l’équation [28] est simplement définie comme suit.

Dans ce cas, on peut concrétiser l’équation [33] en utilisant l’équation [38].

Modèle de temps d’écoulement pour un diagramme fondamental parabolique
Lorsqu’on utilise le diagramme fondamental parabolique, la situation se complique dans la mesure où les véhicules circulent avec des vitesses différentes même en cas de densités sous-critiques. Si la distribution temporelle d’afflux de l’arc est constante segmentée, la distribution temporelle du temps d’écoulement des tronçons peut être déterminée au moins approximativement à partir de la théorie simplifiée des ondes cinématiques (STKW). L’idée fondamentale est d’observer la trajectoire d’un véhicule qui s’engage sur l’arc a à l’instant t ainsi que les différentes vitesses rencontrées le long de l’arc, et d’en déduire son temps ta(τ). Une description du modèle précis figure ci-après. Dans la mesure où il peut entraîner un temps de calcul très long, il est ensuite remplacé par un modèle plus simple qui calcule la moyenne des états de trafic, ce qui restreint le nombre de situations de trafic différentes rencontrées par un véhicule sur l’arc. Si vous souhaitez seulement un aperçu général du modèle, vous pouvez directement consulter la fin de cette section (Attributs d’entrée et de sortie de l’Équilibre Utilisateur Dynamique)
Illustration 131 : Diagramme d’écoulement issu de la théorie simplifiée des ondes cinématiques
En s’appuyant sur la théorie simplifiée des ondes cinématiques (STKW), les véhicules modifient leurs vitesses instantanément. Comme le montre l’Illustration 131, les trajectoires sont linéaires segmentées lorsque la distribution temporelle d’afflux est constante. De plus, le diagramme espace-temps est divisé en secteurs avec des états de charge homogènes délimités par des ondes de choc linéaires. La pente Waij de l’onde de choc, qui sépare les deux états de charge sous-critiques Φ(fai) et Φ(faj) est la suivante :

Pour une distribution temporelle d’afflux constante segmentée, on peut théoriquement déterminer la trajectoire d’un véhicule s’engageant sur l’arc à l’instant t et par conséquent son temps d’écoulement sous-critique ra(τ). L’Illustration 131 montre cependant qu’il peut être particulièrement pénible de déterminer ces trajectoires.
- Un grand nombre d’ondes de choc peuvent être actives simultanément sur l’arc.
- Des ondes de choc peuvent être générées soit à la section initiale par des discontinuités de charges aux instants τi, 0 ≤ i ≤ n-1, soit sur n’importe quelle section d’arc à n’importe quel moment par des intersections d’ondes de choc.
- Un véhicule peut rencontrer un grand nombre d’ondes de choc lors de son déplacement sur l’arc et il faut explicitement évaluer toutes les intersections afin de déterminer sa trajectoire.
Pour surmonter ces difficultés, on part du principe qu’une onde de choc fictive, qui sépare les charges réelles Φ(fai+1) d’un secteur où la vitesse moyenne du véhicule qui s’engage sur l’arc à l’instant τi est λi = L / (rai - τi), est générée à chaque instant ri, 0 ≤ i ≤ n-1, à la section initiale de l’arc, comme le montre l’Illustration 132.
Les ondes de choc fictives sont faciles à traiter pour les raisons suivantes :
- Elles ne se touchent jamais et sont donc toutes générées sur la section initiale du tronçon actuel à l’instant τi, 0 ≤ i ≤ n-1.
- Chaque véhicule rencontre au plus la dernière onde de choc fictive générée, de sorte que sa trajectoire peut être déterminée très facilement.
En s’appuyant sur l’équation [36], la pente Wai de l’onde de choc fictive est la suivante :

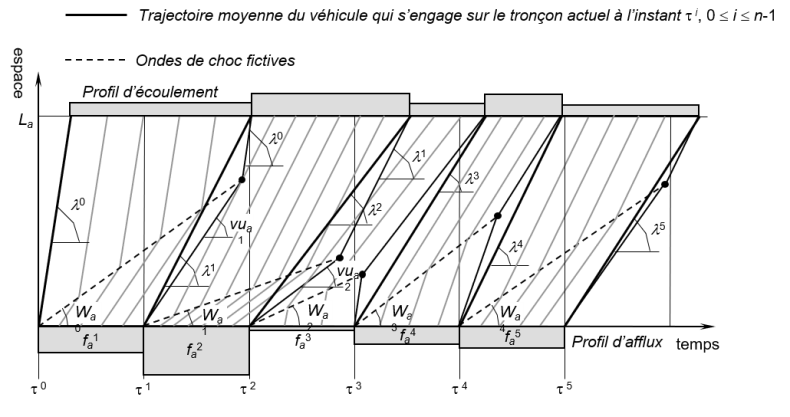
Illustration 132 : Diagramme d’écoulement issu du modèle moyenné d’ondes cinématiques
Il convient de noter que la trajectoire d’un véhicule qui s’engage sur le tronçon actuel à l’instant τ ∈ (τi-1,τi] est seulement influencée directement par la trajectoire approximative du véhicule qui s’est engagé sur le tronçon à l’instant τi-1, qui regroupe l’historique des états de trafic sur l’arc.
L’approximation introduite n’a guère d’impact sur l’efficacité du modèle. En outre, elle n’a aucun impact en ce qui concerne la règle FIFO, toujours en vigueur entre la section initiale et la section finale de l’arc, tandis que des entorses sur les sections intermédiaires sont négligées.
Sur cette base, le temps de déplacement sous-critique τai = τa(τ)i, 0 ≤ i ≤ n-1 peut être défini de la manière suivante :
a) Lorsqu’un véhicule qui s’engage sur l’arc à l’instant τi ne rencontre pas l’onde de choc fictive Wai-1 avant la fin de l’arc, son temps d’écoulement sous-critique est le suivant :
fai correspond à l’afflux d’arc pendant l’intervalle de temps (τi-1,τi].
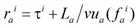
b) Sinon, son temps d’écoulement sous-critique est déterminé de la manière suivante sur la base des deux vitesses du véhicule avant et après la rencontre de l’onde de choc fictive :

ωi est le temps de parcours avant d’atteindre l’onde de choc fictive (Illustration 133).

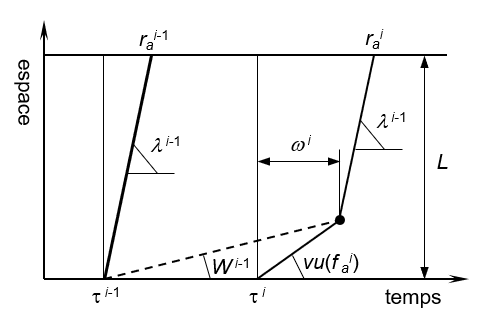
Illustration 133 : Détermination du temps d’écoulement sous-critique de l’arc
Le temps de déplacement sous-critique ra(τ) qui définit [32] est alors le suivant :

Modèle de capacités d’afflux
Cette section explique comment un encombrement qui se forme sur la section finale d’un arc en raison de la capacité d’écoulement se propage en sens inverse du sens de circulation et restreint finalement la capacité d’afflux de l’arc. Cette partie du modèle est uniquement utilisée quand l’option Calculer encombrement est activée pour l’exécution de l’EUD (Utilisation : Configurer et calculer le modèle d’encombrement). Quand l’option n’est pas activée, on admet une capacité de file d’attente illimitée des arcs et on suppose que la capacité d’afflux d’un tronçon n’est jamais inférieure à la capacité d’entrée.
Pour une meilleure compréhension, on part du principe que la congestion est incompressible, c.-à-d. qu’il existe seulement une densité surcritique. La vitesse d’onde de congestion n’est alors pas limitée (il ressort de l’Illustration 127 et de l’Illustration 128 que wa = ∞ lorsque KJa = k2a), de sorte qu’une charge surcritique survenant sur la section finale se propage immédiatement en amont. Cette circonstance ne signifie pas que la congestion atteint immédiatement la section initiale. En effet, la charge surcritique qui s’écoule n’a aucune influence sur la charge sous-critique affluente jusqu’à ce que l’arc soit entièrement occupé, c.-à-d. que le nombre cumulé de véhicules engagés sur l’arc est égal au nombre de véhicules ayant quitté l’arc, la capacité de file d’attente en plus. Celle-ci est constante dans le temps et provient de la longueur d’arc multipliée par la densité de congestion maximale. Dès que la longueur de la congestion dépasse celle de l’arc, la capacité d’afflux devient égale à la capacité d’écoulement, c.-à-d. que tous les véhicules sur l’arc se déplacent comme une file rigide.
Dans la réalité, les états de charge surcritiques peuvent même survenir pour des densités différentes. Leurs vitesses d’onde de congestion sont non seulement inférieures à v0, impliquant un retard de leur propagation spatiale rétrograde de la section finale d’arc à la section initiale, mais se distinguent aussi les unes des autres, ce qui entraîne une distorsion de leur propagation temporelle vers l’avant. Les diagrammes fondamentaux utilisés ici représentent certes les effets de retard prépondérants mais pas les effets de distorsion, car toutes les ondes de congestion rétrogrades ont la même pente.
L’impact de l’encombrement sur la capacité d’afflux est calculé de manière analytique conformément à la théorie simplifiée des ondes cinématiques (STKW). L’état de charge sur une section de l’arc résulte de l’interdépendance de charges sous-critiques en amont et de charges surcritiques en aval. Pour la section initiale d’un arc, l’état de charge en amont correspond à l’afflux tandis que les états de charge en aval proviennent de la capacité d’écoulement propagée en amont, dont découle la distribution temporelle dite « de l’afflux maximal cumulé ».
Conformément au principe du minimum de Newell-Luke, l’état de charge coïncidant avec le phénomène d’encombrement qui survient sur la section initiale est celui dont la charge cumulée est la plus faible. Par conséquent, lorsque l’afflux cumulé correspond à l’afflux cumulé maximal ou le dépasse, engendrant un encombrement, la dérivée de la distribution temporelle de l’afflux cumulé maximal peut être interprétée comme la limite supérieure de l’afflux. On peut alors déterminer la valeur correcte de la capacité d’afflux, qui limite la longueur de congestion à la longueur de l’arc.
L’instant ua(τ) où l’onde de congestion rétrograde générée à l’instant τ sur la section finale de l’arc a∈A par la charge d’écoulement surcritique ea(τ) = Ψa(τ) atteindrait la section initiale est défini de la manière suivante.

Par définition, les points dans le temps et l’espace qui constituent les trajectoires en ligne droite générées par une onde de congestion sont caractérisés par le même état de charge. En outre, l’Illustration 134 montre que le nombre de véhicules rencontré par l’onde surcritique relatif à la charge d’écoulement q pour une distance infinitésimale ds parcourue en sens inverse correspond à l’intervalle de temps ds  , multiplié par cette charge. En calculant l’intégrale le long de l’arc de la section finale à la section initiale, on obtient le flux cumulé maximal Ha(τ) que l’on observerait à l’instant ua(τ) à la section initiale, avec
, multiplié par cette charge. En calculant l’intégrale le long de l’arc de la section finale à la section initiale, on obtient le flux cumulé maximal Ha(τ) que l’on observerait à l’instant ua(τ) à la section initiale, avec

Illustration 134 : Trajectoires d’une onde de congestion surcritique et des véhicules rencontrés
Dans les diagrammes fondamentaux utilisés, la branche surcritique est linéaire et ua(τ) est donc réversible. Dans la mesure où wa(q) = wa, le temps pour ua(τ) = τ, en s’appuyant sur [43], σ = τ - La /wa. De plus, on a Ha(τ) = Ea(τ) + La • KJa, en s’appuyant sur [44], q/va(q) = KJa - q/wa. Ainsi, l’afflux maximal cumulé Ga(τ), qui aurait pu s’engager sur l’arc à l’instant t conformément à la charge d’afflux, résulte de l’équation suivante :

Lorsque l’afflux cumulé Fa(τ) est supérieur ou égal à l’afflux cumulé maximal Ga(τ) à l’instant t, de sorte qu’un encombrement se forme à cet instant, la capacité d’afflux μa(τ) est définie par la dérivée dGa(τ)/dτ de l’afflux cumulé maximal ; sinon elle correspond à la capacité d’entrée Qa.
La dérivation de Ga(τ) donne :
 =
= 
Dans la mesure où ea(τ - La /wa), on a :
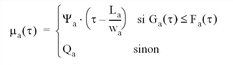
L’Illustration 135 montre que l’on peut obtenir la courbe de distribution temporelle de l’afflux cumulé maximal graphiquement en s’appuyant sur l’équation [45] par un décalage (flèches épaisses) de la distribution temporelle de l’afflux cumulé de La / wa dans le temps et de La • KJa pour la valeur. Elle met par ailleurs en évidence que si Ga(τ) est supérieur à Fa(τ), la congestion est plus courte que La et μa(τ) = Qa.
Sinon un encombrement se forme et μa(τ) = Ψa(τ - La /wa).
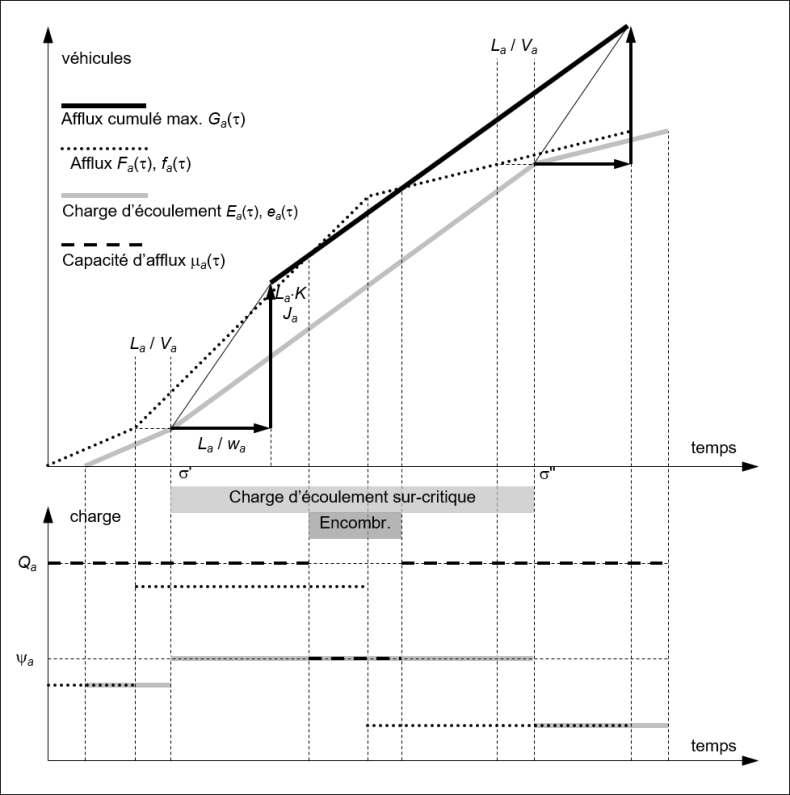
Illustration 135 : Détermination graphique des distributions temporelles des capacités d’afflux dans le cas d’un diagramme fondamental triangulaire, de l’afflux constant segmenté et de la capacité d’écoulement constante
Modèle de capacités d’écoulement
Cette section décrit un modèle permettant de déterminer les capacités d’écoulement des arcs en amont par rapport à un nœud donné en s’appuyant sur les capacités d’afflux des arcs en aval et des charges de mouvements tournants. De même que le graphe est constitué à partir du réseau Visum, il existe dans ce modèle uniquement deux types de nœuds. Il s’agit de convergences et d’embranchements. Dans ce cas, le modèle peut être décrit au moyen d’afflux d’arcs et d’écoulement d’arcs.
Si on considère une convergence x∈N, qui se compose d’un carrefour avec un arc sortant unique, la capacité d’afflux μb(τ) de cet arc b = FS(x) à l’instant t doit être répartie entre les arcs entrants dont les écoulements sont en concurrence pour traverser le carrefour. En principe, on admet que la capacité existante est répartie proportionnellement à la capacité de sortie Sa de chaque arc a∈BS(x). Néanmoins, l’écoulement μa(τ) d’un arc a est éventuellement inférieur à la part de la capacité d’afflux qui lui est assignée, de sorte que seule une petite partie est utilisée. La capacité d’afflux restante est alors répartie sur les autres arcs. S’il n’existe aucun encombrement, la capacité d’écoulement Ψa(τ) et la capacité de sortie Sa sont mises au même niveau.
Si on considère un embranchement x∈N, qui se compose d’un carrefour avec un arc entrant unique, l’écoulement de cet arc a = BS(x) est déterminé au moyen de la capacité d’afflux la plus restrictive parmi les arcs sortants. Si aucun arc ne présente d’encombrement, la capacité d’écoulement et la capacité de sortie sont à nouveau mises au même niveau. Si seul un arc b∈FS(x) présente un encombrement, c.-à-d. fb(τ) ≥ μb(τ), la capacité d’écoulement μa(τ), multipliée par la part de véhicules tournant vers l’arc b, et la capacité d’afflux de b sont mises au même niveau, afin de conserver la capacité au nœud, la règle FIFO Ψa(τ) • fb(τ) / μa(τ) = μb(τ) appliquée à tous les véhicules quittant l’arc a étant satisfaite. Si plus d’un arc b∈FS(x) présente un encombrement, la capacité d’écoulement est la plus petite de ces valeurs. Il en résulte l’équation suivante :

Il convient de noter que, contrairement aux modèles présentés dans les deux sections précédentes, ce modèle n’est pas séparable dans l’espace, car les capacités d’écoulement de tous les arcs associés à l’arc sortant du même nœud sont déterminées ensemble, mais séparable dans le temps, car toutes les relations se rapportent au même instant.
On part du principe que les véhicules n’encombrent pas le carrefour s’ils ne peuvent pas la traverser en raison d’un encombrement sur l’arc suivant et qu’ils attendent un espace suffisant. Le modèle ne peut modéliser la détérioration des temps généralisés en raison d’un abus de la capacité de carrefour.
Modèle de coût d’arcs
Le coût pour les véhicules qui s’engagent sur l’arc a à l’instant t est obtenu de la manière suivante.

ma(τ) désigne le coût monétaire et η la valeur du temps.