Operating principles of the car following model
Vehicles are moving in the network using a traffic flow model. The quality of the traffic flow model is essential for the quality of the simulation. In contrast to simpler models in which a largely constant speed and a deterministic car following logic are provided, Vissim uses the psycho-physical perception model developed by Wiedemann (1974) (Driving states in the traffic flow model according to Wiedemann). The basic concept of this model is that the driver of a faster moving vehicle starts to decelerate as he reaches his individual perception threshold to a slower moving vehicle. Since he cannot exactly determine the speed of that vehicle, his speed will fall below that vehicle’s speed until he starts to slightly accelerate again after reaching another perception threshold. There is a slight and steady acceleration and deceleration. The different driver behavior is taken into consideration with distribution functions of the speed and distance behavior.
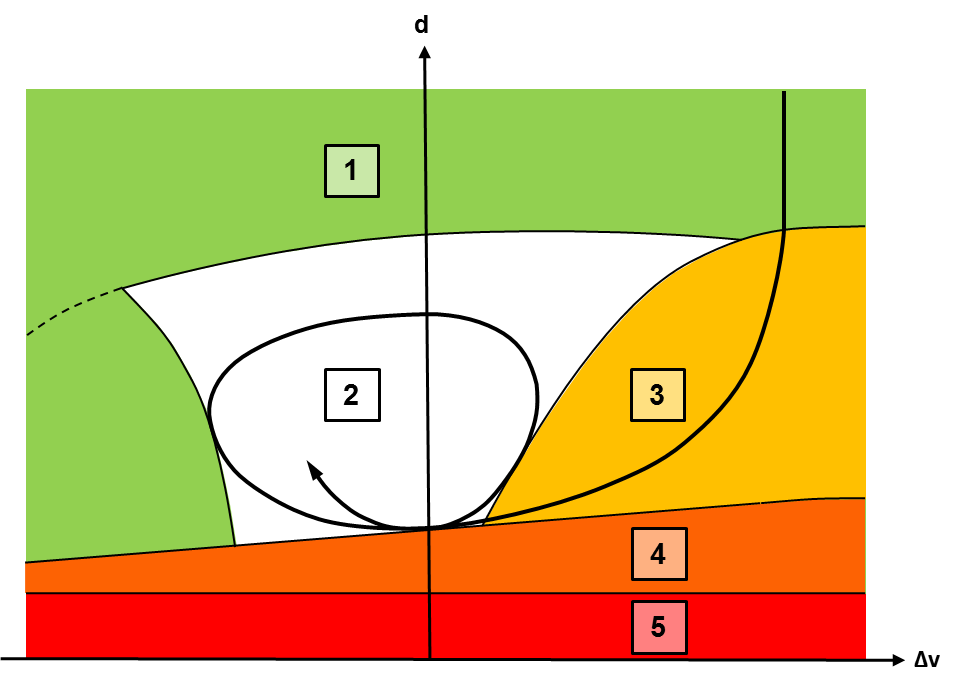
Car following model (according to: Wiedemann 1974)
Legend
| Axes: d: Distance, Δv: Change in speed | 3: Approaching state |
| 1: "Unregulated behavior” state | 4: Braking state |
| 2: Following state | 5: Collision state |
The car following model has been calibrated through multiple measurements at the Institute of transport studies of the Karlsruhe Institute of Technology (since 2009 KIT – Karlsruhe Institute of Technology), Germany. Recent measurements ensure that changes in driving behavior and technical capabilities of the vehicles are accounted for.
Vissim calculates the acceleration of a vehicle during free traffic flow, below the desired speed, based on the following:
- If the current distance corresponds to the desired safety distance, the vehicle accelerates to the speed of the preceding vehicle. If the own desired speed is lower, the vehicle accelerates to it.
- If the distance is between 100 and 110 percent of the desired safety distance, the target speed is interpolated linearly.
- If the desired safety distance is equal to 110 percent, the vehicle accelerates to its desired speed.
For multi-lane roadways a driver in the Vissim model takes into account not only the vehicles ahead (default: 4 vehicles), but also the vehicles in the two adjacent lanes. In addition, a signal controller for about 100 meters before reaching the stop line leads to increased attention of the driver.
Vissim simulates the traffic flow by moving driver-vehicle-units through a network. Every driver with his specific behavior characteristics is assigned to a specific vehicle. As a consequence, the driving behavior corresponds to the technical capabilities of his vehicle. Attributes characterizing each driver-vehicle unit can be subdivided into following three categories:
- Technical specification of the vehicle, for example:
- Vehicle length
- Maximum speed
- Accelerating power
and:
- Actual vehicle position in the network
- Actual speed and acceleration
- Behavior of driver-vehicle units, for example:
- Psycho-physical perception thresholds of the driver, e.g. ability to estimate, perception of security, willingness to take risk
- Driver memory
- Acceleration based on current speed and driver’s desired speed
- Interdependence of driver-vehicle units, for example:
- Reference to vehicles in front and trailing vehicles on own and adjacent lanes
- Reference to currently used network segment and next node
- Reference to next traffic signal
Superordinate topic:
