環状障壁コントローラーの使用
環状障壁コントローラー (RBC) は Vissimに統合されています。環状障壁コントローラーは、さまざまなタイプの信号コントローラーを Vissim モデルでシームレスにシミュレートする方法をユーザーに提供します。
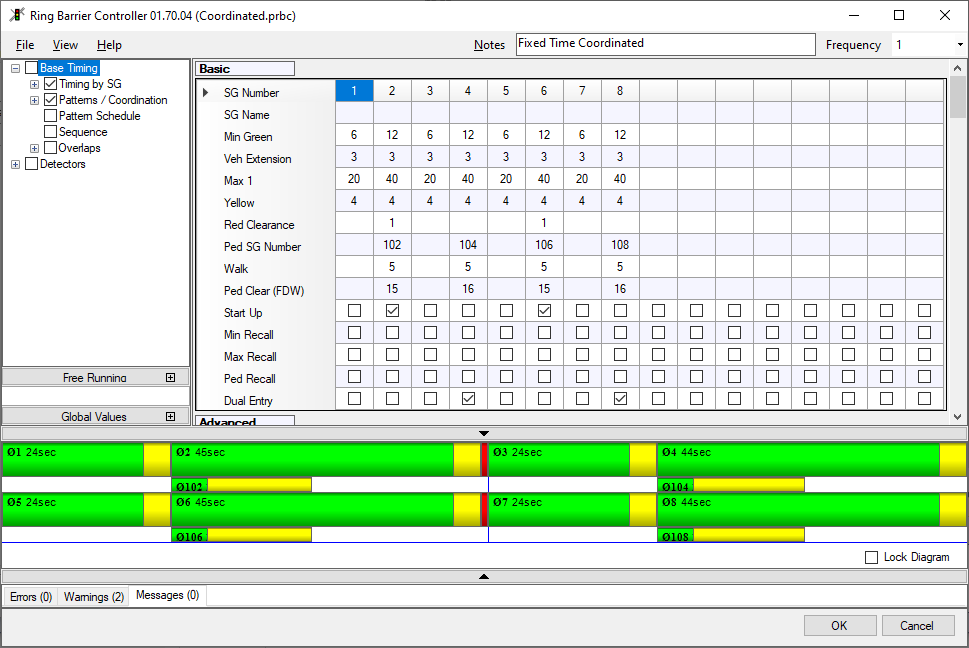
シミュレーション中、 Vissim は感知器と信号機の状態をコントローラーに渡し、コントローラーは次のシミュレーション時間の中で信号機の状態を返します。この相互作用に使用されるシミュレーション時間期間は、コントローラー周波数によって決定され、10分の1秒まで小さくすることができます。[RBC Editor]-[環状障壁コントローラーエディター] では、コントローラーによる Vissim シミュレーション中に使用される計時を設定することができ、これらの値は *.prbc という拡張子を持つ外部環状障壁コントローラーデータファイルに保存されます。
|
|
注意: 信号グループ番号を追加、削除、変更した場合は、 Vissim ファイルを保存してください。そうしないと、 Vissim ファイルとコントローラーファイルの互換性がなくなる可能性があります! |

コントローラーの一般的な特徴
- 16個の信号グループ、4つリング、8つの障壁、16個のオーバーラップ信号グループ
- 信号グループごとに最大青時間は3つあり、最大青の動的操作が行われます
- 最小、最大、歩行者
感知器 機能
- 64台の車両感知器
- プログラム可能な呼び出しおよび延長信号グループ
- 計時の延長と遅延
- キャリーオーバー(延長)タイマー付き停止バー切断モード
- 感知器の相互切り替え
- 16台の歩行者感知器
調整機能
- 7つの調整パターン
- パターンごとのサイクル時間とオフセット
- 移行時の信号グループごとの柔軟なスプリットの拡大と縮小
- 固定またはフローティングのフォースオフ(信号グループごと)
- オートマチックパーミッシブ計算:
- 許容制限タイマー付きシングルバンドまたはマルチバンドのパーミッシブモード
- 各パターン中にプログラム可能なリコールがアクティブ
- 作動する調整信号グループは、早期にギャップアウトし、未使用の時間を需要の大きい動きに分布することができます
