自動車追従モデルの動作原理
車両は、交通流モデルを利用してネットワーク内を移動します。交通流モデルの品質は、シミュレーションの品質にとって非常に重要です。速度が概ね一定で、決定論的車両追従ロジックを備えたシンプルなモデルとは対照的に、Vissimは、Wiedemann(1974年)によって開発された心理物理的認識モデルを利用しています (Wiedemannに準拠した交通フローモデルの運転状態)。このモデルの基本的なコンセプトは、速い速度で動いている車両の運転手は、自分の個人的な認識のしきい値に達すると、低速で動く車両にまで減速を開始する、というものです。運転手は、相手の車両の速度を正確に判別することはできないため、自分の車両の速度は、相手の車両の速度に等しくなった後、再びわずかな加速を開始するまで、その車両より速度は遅くなります。若干の安定した加速と減速が行われます。速度および距離の挙動の分布関数では、さまざまな運転挙動が考慮に入れられます。
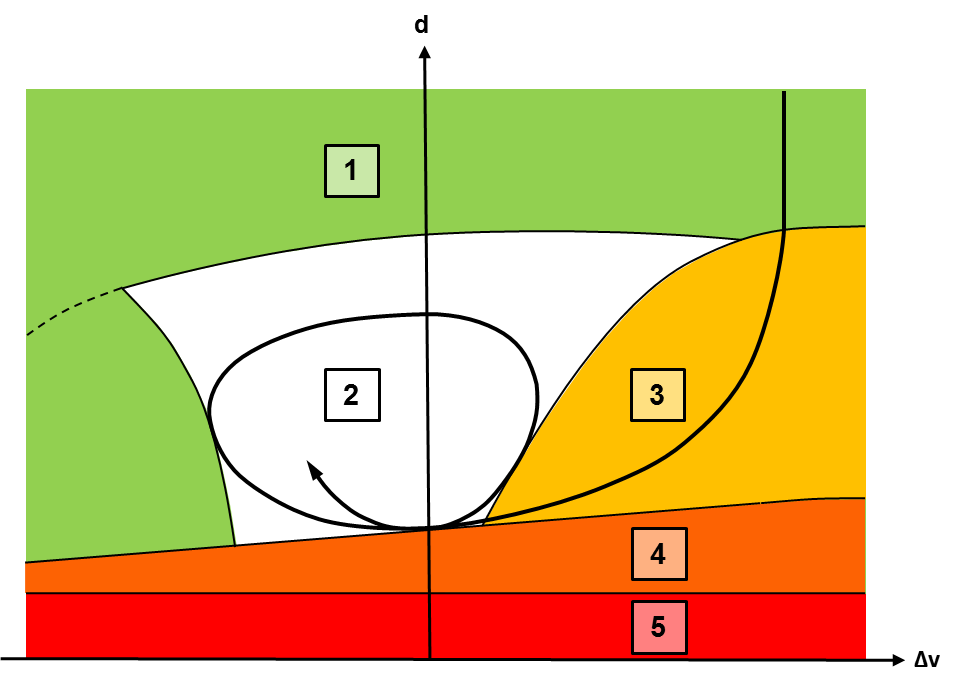
自動車追従モデル(Wiedemann 1974による)
凡例
| 軸:d:距離、Δv:速度の変化 | 3:接近状態 |
| 1:「無秩序な挙動」状態 | 4:ブレーキ状態 |
| 2:追従状態 | 5:衝突状態 |
自動車追従モデルは、ドイツのKarlsruhe Institute of Technology(2009年からはKIT – Karlsruhe Institute of Technology)の交通学研究所における複数の測定値を通じて校正されています。最新の測定値では、運転挙動と車両の技術的能力の変動が検証されています。
Vissimでは、以下の要因に基づいて、希望速度未満の自由な交通流時の車両の加速度を計算します:
- 現在の距離が希望安全距離に対応していれば、車両は、先行車両の速度まで加速します。自分の現在の希望速度が遅ければ、車両は、その速度まで加速します。
- 距離が希望安全距離の100パーセントから110パーセントの間の場合、目標速度は、直線的に補間されます。
- 希望安全距離が110パーセントの場合、車両は、その希望速度まで加速します。
複数車線の道路では、Vissimモデルにおける運転手は、前方にいる車両のみ(デフォルトでは4台)だけでなく、隣接する2車線にいる車両も考慮します。さらに、停止線の約100メートル手前に信号コントローラーがあれば、運転手の注意力が強まります。
Vissimは、ネットワーク上で[driver-vehicle-units]-[運転手-車両-ユニット]を移動して交通流をシミュレートします。この特定の挙動特性を備えたドライバーが、特定の車両に割り当てられます。結果として、運転の挙動はこの車両の技術的能力に応じたものとなります。それぞれの運転手-車両ユニットを特徴付ける属性は、次の3つのカテゴリーに分けることができます。
- 次のような車両の技術的仕様:
- 車両の長さ
- 最大速度
- 加速力
および:
- ネットワーク内の実際の車両の位置
- 実際の速度と加速
- 次のような運転手-車両ユニットの挙動。
- 運転手の心理的物理的認識のしきい値。推測能力、安全意識、リスクに対応しようとする気持ちなど
- 運転手の記憶
- 現在の速度と運転手が望む速度に基づく加速
- 次のような、運転手-車両ユニットの相互依存性。
- 同一車線および隣接車線の前方および後方の車両の参照
- 現在使用中のネットワークセグメントと次のノードの参照
- 次の交通信号の参照
親見出し:
