Fahrverhaltensparameter Folgeverhalten bearbeiten
1. Wählen Sie im Menü Basisdaten > Fahrverhalten.
Die Liste Fahrverhalten öffnet sich. Einige Fahrverhaltensparametersätze können vordefiniert sein.
Sie können die Liste standardmäßig bearbeiten (Listen verwenden).
Sie können alle Fahrverhaltensparameter in der Liste ändern oder mit folgenden Schritten in Registern.

|
Hinweis: Sie können in Listen über das Symbol |

2. Klicken Sie mit der rechten Maustaste auf den gewünschten Eintrag.
3. Wählen Sie im Kontextmenü den Eintrag Bearbeiten.
Das Fenster Fahrverhalten öffnet sich.
4. Wählen Sie das Register Folgeverhalten.
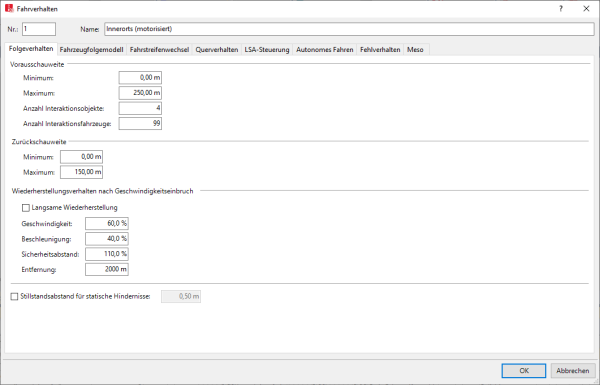
5. Geben Sie die gewünschten Daten ein.
| Element | Beschreibung |
|---|---|
|
Vorausschauweite |
Minimum, Maximum: Minimale und maximale Entfernung, die ein Fahrzeug nach vorn schauen kann, um auf Fahrzeuge und Interaktionsobjekte stromabwärts entlang seiner der Route oder seines Weges zu reagieren. Das Fahrzeug berücksichtigt die Vorausschauweite zusätzlich zur eingegebenen Anzahl der Interaktionsobjekte. Die Vorausschauweite wirkt auch beim Aufrücken auf ein stehendes Hindernis, damit das Fahrzeug seine Geschwindigkeit gleichmäßig reduziert. Die minimale Vorausschauweite ist relevant, wenn das Querverhalten der Fahrzeuge berücksichtigt werden muss:
Die maximale Vorausschauweite müssen Sie nur erhöhen, wenn Sie beispielsweise Schienenverkehr mit Blocksicherung modellieren (Blocksicherung für den Schienenverkehr modellieren). |
|
Anzahl Interaktionsobjekte |
Anzahl der Vorderfahrzeuge und/oder Anzahl der nachstehend aufgeführten Netzobjekte, die das Fahrzeug entlang seiner der Route oder seines Weges wahrnimmt, um auf diese zu reagieren. Fahrzeuge berücksichtigen zusätzlich zur eingegebenen Anzahl der Interaktionsobjekte die minimale und maximale Vorausschauweite. Folgende Netzobjekte sind in Vissim als Fahrzeug modelliert. Fahrzeuge nehmen diese Netzobjekte wie ein Vorderfahrzeug wahr. Diese Netzobjekte wirken dann wie ein roter Signalgeber. Wenn mehrere dieser Netzobjekte innerhalb einer sehr kurzen Distanz liegen, geben Sie einen höheren Wert für die Anzahl Interaktionsobjekte ein. Dadurch kann sich jedoch die Berechnungszeit der Simulation geringfügig erhöhen.
Fahrzeuge nehmen auch folgende Netzobjekte wie ein Vorderfahrzeug wahr, wenn sie dort anhalten müssen:
Verhalten bei Konfliktflächen: Ein Fahrzeug berücksichtigt stromabwärts alle Konfliktflächen bis zu dem entferntesten Interaktionsobjekt, das in der Anzahl der Interaktionsobjekte angegeben ist. Standardwerte der Anzahl Interaktionsobjekte für vordefinierte Fahrverhalten:
Sie können im Attribut Anzahl Interaktionsfahrzeugedie Anzahl der Fahrzeuge angeben, die Vissim in der Anzahl Interaktionsobjekte neben den oben genannten Netzobjekten berücksichtigt. Das Fahrzeug nimmt maximal die Anzahl Interaktionsobjekte wahr. |
|
Anzahl Interaktionsfahrzeuge |
Anzahl der Vorderfahrzeuge, die das Fahrzeug entlang seiner der Route oder seines Weges wahrnimmt, um auf diese zu reagieren.
Standardwert für alle vordefinierten Fahrverhalten: 99 Fahrzeuge. Wenn Sie beispielsweise ein autonomes Fahrzeuge modellieren, dessen Sensoren nicht durch ein Vorderfahrzeug hindurch weitere Fahrzeuge erkennen können. setzen Sie den Wert Anzahl Interaktionsfahrzeuge =1. |
|
Zurückschauweite |
Minimum, Maximum: Minimale und maximale Entfernung, die ein Fahrzeug zurück schauen kann, um auf Fahrzeuge stromaufwärts zu reagieren. Die Zurückschauweite wirkt am Fahrzeug ausschließlich auf die Wahrnehmung anderer Fahrzeuge, andere Interaktionsobjekte nimmt das Fahrzeug nicht wahr. Die Anzahl Interaktionsobjekte innerhalb der Zurückschauweite wird ausschließlich bei der Berechnung des Querverhaltens des Fahrzeugs berücksichtigt. In allen anderen Fällen nimmt das Fahrzeug beim Zurückschauen maximal ein anderes Fahrzeug wahr. Wirkung der minimalen Zurückschauweite beim Querverhalten: Wenn das Überholen innerhalb des Fahrstreifens möglich ist, geben Sie den Wert größer 0.00 ein, beispielsweise innerstädtisch 20-30 m, außerorts entsprechend größere Werte. Damit vermeiden Sie, dass Fahrzeuge durch einander hindurch fahren, wenn sich mehr Fahrzeuge auf derselben Strecke vor einer Haltelinie einordnen möchten, als im Attribut Anzahl Interaktionsobjekte angegeben ist. Dies gilt insbesondere für Zweiräder. Die maximale Zurückschauweite können Sie in kleinmaschigen Netzen reduzieren, in denen beispielsweise viele Verbindungsstrecken in geringer Entfernung voneinander liegen. Dies kann sich positiv auf die Simulationsgeschwindigkeit auswirken. |
|
Stillstandsabstand für statische Hindernisse |
Stillstandsabstand (ax) stromaufwärts von statischen Hindernissen. Dies sind beispielsweise Signalgeber, Stoppschilder, Haltestellen, Querverkehrsstörungen, Konfliktflächen. Nicht gültig für Stoppschilder in Parkplätzen. Fahrzeuge verwenden den eingegebenen Wert, Minimum: 0.01 m. Der Standardwert ist 0.5 m. Wenn Sie eine Datei *.inpx öffnen, in der das Attribut den Wert 0 hat, wird der Wert auf 0.01 m geändert. Wählen Sie diese Option für ÖV-Fahrzeuge an Haltestellen mit Bahnsteigtüren und Warteschlangen an festen Positionen auf dem Bahnsteig. |
In der Liste Fahrverhalten können Sie weitere Attribute auswählen. Darunter sind beispielsweise folgende:
| Element | Beschreibung |
|---|---|
|
Erhöhte Beschleunigung |
ErhöhBeschl: Beschleunigung erhöhen, mit der das Fahrzeug einem Vorderfahrzeug folgt, das beschleunigt. Standardwert 100 %, Wertebereiche 100 % bis 999 %. Beim Standardwert 100 % fällt das Fahrzeug zurück, wenn das Vorderfahrzeug beschleunigt. Erst wenn das Vorderfahrzeug aufgehört hat zu beschleunigen, erfolgt die Annäherung. Beim einem Wert > 100 % beschleunigt das Fahrzeug, wenn das Vorderfahrzeug beschleunigt und freie Beschleunigung möglich ist. Erhöhte Beschleunigung wirkt bei den Fahrzeugfolgemodellen Wiedemann 74 und Wiedemann 99. Erhöhte Beschleunigung wirkt auf folgende Beschleunigungen:
Ruckbegrenzung im Fahrzeugmodell Wiedemann 99: Wenn sich das Fahrzeug im Interaktionszustand Wunsch befindet, wird im ersten Zeitschritt des Fahrzeugs die Beschleunigung mit dem Modellparameter CC7 Beschleunigung bei Oszillation begrenzt. Die Ruckbegrenzung wird nicht durchgeführt, wenn für Erhöhte Beschleunigung ein Wert > 100 % ausgewählt ist, der Abstand dx > Sicherheitsabstand dsx ist und das Vorderfahrzeug beschleunigt. |