The priority according to which the SD software sorts events, depends on several factors, such as:
- Event severity and duration
- The damage potentially produced by the event under normal traffic conditions
- The number of road users who would be affected by the event
- The distance between the variable message sign and the event
The response of SD consists of a set of messages of all relevant events, sorted by priority.
The set of messages can be reduced to a subset, based on threshold values.
| Parameter | Description |
|---|---|
| ET | Set of the events |
| E | Set of the active events, E ⊂ ET |
| e | Generic event, e ∈ ET |
| S | Set of variable message signs |
| s | Generic variable message sign (real or virtual), s ∈ S |
| t | Current instant, t ∈ ℝ |
| tie | Starting instant of the event, e ∈ ET, tie ∈ ℝ |
| tfe | Ending instant of the event, e ∈ ET, tfe ∈ ℝ |
| A | Set of the links of the street graph |
| AE | Set of the links that contain at least one event, AE ⊂ A |
| a | Generic link of the graph, a ∈ A |
| A(e) | Set of the links on which there is the event e, e ∈ ET, A(e) ⊂ AE |
| a(e) | One of the links on which there is the event e, e ∈ ET, a(e) ∈ A(e) |
| a(s) | Link on which there is the variable message sign s, s ∈ S, a(s) ∈ A |
By definition, active events are events for which their ending instant is either greater than the current instant or not specified.
Programmed events are events that have both their start time and their end time in the future. So they are also active events.
Thus, the system can provide information in advance with respect to the event start. Formally:
E = {e ∈ ET: tfe ≥ t}
The visualization priority pvse of a generic active event e on a generic variable message sign s is defined as:
pvse = pie × pra(s)a(e)
where:
| Parameter | Description |
|---|---|
| pie | Coefficient of the intrinsic priority of event e (disregarding a(s)). This relates to the severity of the event itself. |
| pra(s)a(e) | Coefficient of the relative priority with respect to variable message sign s. This relates to the probability of a vehicle located on link a(s) to encounter event e on its route. |
The intrinsic priority pie of a generic event e is defined as a linear combination of the following parameters:
| Parameter | Description |
|---|---|
| iee | Event importance |
| dee | Event damage |
| pee | Event temporal distance |
Event importance
The event importance iee is exogenously defined with an absolute value iee ∈ ℝ (→ Smart Display configuration > Event attributes).
Event damage
The event damage dee is defined as the delay caused by a reduction of capacity rce or speed rve due to the event, namely:
where:
| Parameter | Description |
|---|---|
| T1 | Maximum delay in seconds |
| rve | Share speed reduction in the interval [0,1]
|
| rce | Share capacity reduction in the interval [0,1]
|
| La | Length of the link a |
| Va | Maximum speed of the link a (Where not provided, defsped is used) |
| Ca | Capacity of the link a |
| fa | Estimated flow on the link a if available from offline simulations Else Ca / 2 is used |
For details on the database attribute names, see: → Smart Display configuration.
Given an event e that sets absolute values of speed and / or capacity, the share reductions rve and rce from the original link values are computed as the worse among all the links to which the event e applies.
Given T1 as an upper limit, the delay is computed from the available information with the formula shown above.
The first part of the formula comes from the delay due to a speed reduction, namely:
The second part of the formula is the average loss time in a bottleneck queue due to the capacity reduction, as described in the following example of the bottleneck queue.
Bottleneck queue example:
The event is active between the instants ti and tf. A queue forms while the event has an effect. The queue dissipates between the instants tf and t. The next image depicts this scenario. On the x-axis, there is the time t. On the y-axis, there is the number of vehicles F = F(t):
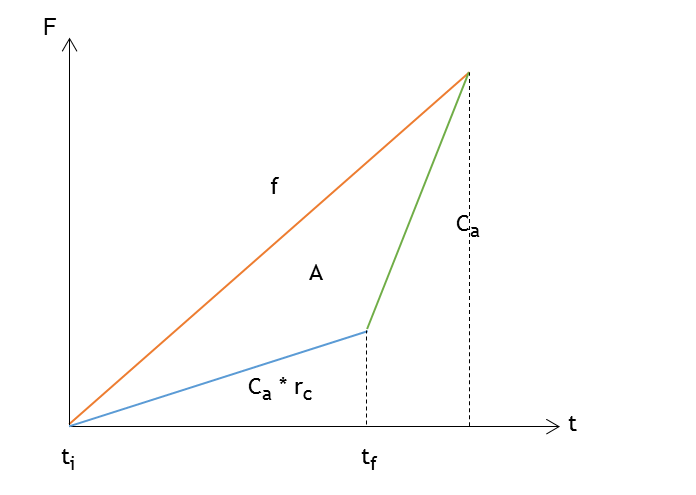
Now consider a constant flow of cars traveling between instants ti ∈ t, represented by the orange straight line. Suppose there is an event within the interval [ti, tf] that reduces the street capacity. Then, in this time interval, the street capacity takes the value Ca × rc, where rc is a capacity reduction, 0 ≤ rc ≤ 1). Next, the street capacity reverts to its original value during the time interval [tf, t]. In the image, these two scenarios are described by the blue line and by the green lines.
The average delay is computed as the ratio between the area of triangle A and the number of vehicles that suffer the delay Nr = (t − ti) × f.
Event temporal distance
The temporal distance pee is defined as the time between the current instant and the start time of the event, namely:
where TR is the maximum temporal distance of the event.
For the attribute names of the DB, see : → Smart Display configuration.
Calculation of the intrinsic priority
Finally, the intrinsic priority is calculated as:
pie = βie × iee + βde × dee + βpe × pee
The coefficients β are configurable parameters. For the filed names of the database: → Smart Display configuration > Parameters.
The relative priority between two generic links a and b, prab, is defined as the traffic portion that, traveling from a, arrives at b. Therefore, the relative priority of an event e from link a, Prm(a,e), is computed by summing up prab for each link b ∈ A(e) with the constraint that each link b has to belong to a different path so that each vehicle reaching any b from a is counted only once.
Additional definitions
| Expression | Definition |
|---|---|
| tm(h, k) | Minimum travel time from the head (ending node) of the generic link h to the head of generic link k tm(h, k) ∈ ℝ+ h ∈ A k ∈ A |
| Ltm(a) | List of links in increasing order in respect to tm(a, h) |
| FSTa | Forward star of a, that is the set of links for which it is possible to turn into, coming from link a (the set does not contain any links for which there is a denied turn from a). This set is given and it represents the street network topology. |
| TotFlow(a) | Total flow on link a (estimated from the static assignment of the demand matrices of the standard day type) |
| currFlow(a,d) | Flow on link a, directed to destination d |
| currTurnFlow(h,k,d) | Flow on the turn from h to k, directed to destination d |
| tpa | Travel time of the link a, computed as La / Va |
| Srhkd | Splitting rate (turning probability) from link h to link k with a fixed destination d (→ Splitting rate computation) |
| E(a) | Set of events that are on link a |
| Prm(a,e) | Relative priority of the message e in respect to link a |
| βvms | Reduction coefficient of relative priority for traveling on a link on which there is a variable message sign βvms ∈ (0,1) |
| αtr | Reduction coefficient of the relative priority for the travel time αTR ∈ (0,1) |
| TTH | Time lag beyond which the events are not relevant and their priority is set to 0 |
| PTH | Threshold of flow percentage for the destination below which the search of events is stopped |
| AS | Set of links that contain at least one variable message sign |
| D | Set of the model destination zones |
The efficient turn for a link a is defined as:
SE(a) = {(h,k) ∈ AxA: tm(a,h) < tm(a,k)}
Algorithm
#======================================================================
# Initialization
#======================================================================
# a <-- Link on which the request is done (external INPUT)
# If an event is not on a link (street of the primary network), it is
# associated to the closest zone (Euclidean distance)
FOR e ∈ E
IF e IS NOT on graph model
ProjectEventOnNearestDestinationZone(e)
ENDIF
NEXT
# If the link a does not belong to the model or if it is on a link of
# the model on which there is no flow, then find the closest link of
# the model on which there is a positive flow
a = FindNearestLinkWithFlow(a)
# Travel time initialization and probabilities initialization on all
# the links except the one in input, for each destination
tm(a,k) = ∞, Ɐ k ≠ a
pr(k,d) = 0, Ɐ k ∈ A, d ∈ D
# Travel time initialization on the input link
tm(a,a) = 0
# Set the priority of all events to zero
prm(a,e)=0 Ɐe ∈ ET
#=====================================================================
# Propagation
#=====================================================================
# Cycle over all destinations
For d ∈ D
# Initialization of the list with the input link
Ltm(a) = {a}
# Initialization of the probability to reach the destination d
# starting from the link a
pr(a,d) = currFlow(a,d) / TotFlow(a)
# While the list is not empty or while not all events have yet been
# reached
DO UNTIL Ltm(a) = Ø
Pop the first link in the list
h: tm(a,h) = min{ tm(a, k), k ∈ Ltm(a)}
Ltm(a) = Ltm(a) \ {h}
For each link k belonging to the forward star of h
FOR k ∈ FSTh
# Compute the probability, for going from link a to destination d
# over link h and link k,
# as the probability of having reached h from a, times the
# probability to turn from h to k, in case of heading to
# destination d
prob_k = pr(h,d) * Srhkd
# If the probability is not zero and greater than the propagation
# threshold configurable from the commandline
IF prob_k > 0 AND prob_k > PTH
if on link k there is a variable message sign
IF k ∈ AS
prob_k = prob_k ∙ β_vms
ENDIF
# Update the probability to reach link k, starting from
# destination d
pr(k,d) += prob_k
# For each event on link k, update the probability to reach
# the event, if this has not yet been reached, summing prob_k
FOR e ∊E(k)
prm(a,e) += prob_k
NEXT
# If link k is not in the list or if the probability
# to reach this link is not zero and greater than the configurable
# threshold and if, moreover, the time of reaching its head
# is minor than the time configurable threshold, then update the
# reaching time of k or insert the link into the list
IF ( k is not element of Ltm(a) OR
(pr(k,d) > 0 AND
pr(k,d) >= PTH AND
(tm(a,h) + tm(h,k)) < TTH) )
tm(a,k) = tm(a,h) + tpk
IF ( k is not element of Ltm(a)
Ltm(a) = Ltm(a) ᴗ {k}
ENDIF
END IF
END IF
NEXT k
LOOP
Next d
# Compute the maximum and minimum reaching time of the events
# required to rescale the relative probabilities of the events
T_MAX = 0
T_min(e) = Inf Ɐ e ∈ E
FOR e ∈ E
FOR k ∈ A(e)
IF tm(a,k) > T_MAX
T_MAX = tm(a,k)
END IF
IF tm(a,k) < T_min(e)
T_min(e) = tm(a,k)
END IF
NEXT
NEXT
FOR e ∈ E
IF TTH > 0 AND T_min(e) > TTH THEN
prm(a,e) = 0
ENDIF
prm(a,e) *= (1 +α_tr∙(T_MAX-T_min(e))/T_MAX)
NEXT
The algorithm terminates when one of the following conditions is met:
- All events have been reached
- All links of the graph reachable from a(s) have been visited
- The time threshold TTH for the probability propagation is exceeded
- The probability has decreased below the threshold PTH on the whole exploration border of the graph
Note that, given a variable message sign s, the algorithm computes the relative priorities towards all the active events.
The computation of the splitting rates from link h to link k for a given destination d is based on the results of a static assignment of the demand matrices on the model network. The static assignment can be deterministic or stochastic. If no matrix is available, it is assumed that there is a unitary demand for each OD pair.
The static assignment is done on the graph of the model. Note that the model graph is the result of:
- A filtering operation of all the existing streets, so some elements are removed
- Simplification of all the existing streets, so some adjacent elements are aggregated
As a result:
- For each street of the street graph, at most one link of the model is given (no link is given if the street has not been included into the assignment graph).
- For each link of the model graph, one or more streets of the street graph are given.
For the streets of the street graph included in the assignment graph, an appropriate mapping is provided to identify the logical connection between a street of the street graph and a link of the model, and vice versa.
Once a static assignment has been performed, it is possible to store the path flows for each path connecting an origin zone O to a destination zone D. Therefore, for each destination, it is possible to sum up all the destination path flows and to compute for all links the total flow that goes to the given destination.
Referring to the pseudo code (→ Relative priority of an event), the flow of link a related to destination d is written to currFlow(a,d). The turn probability from link a to link k going to destination d is given by Srhkd = currTurnFlow(a,k,d) / currFlow(h,d).